################################################ ## Declare ROS messages, services and actions ## ################################################
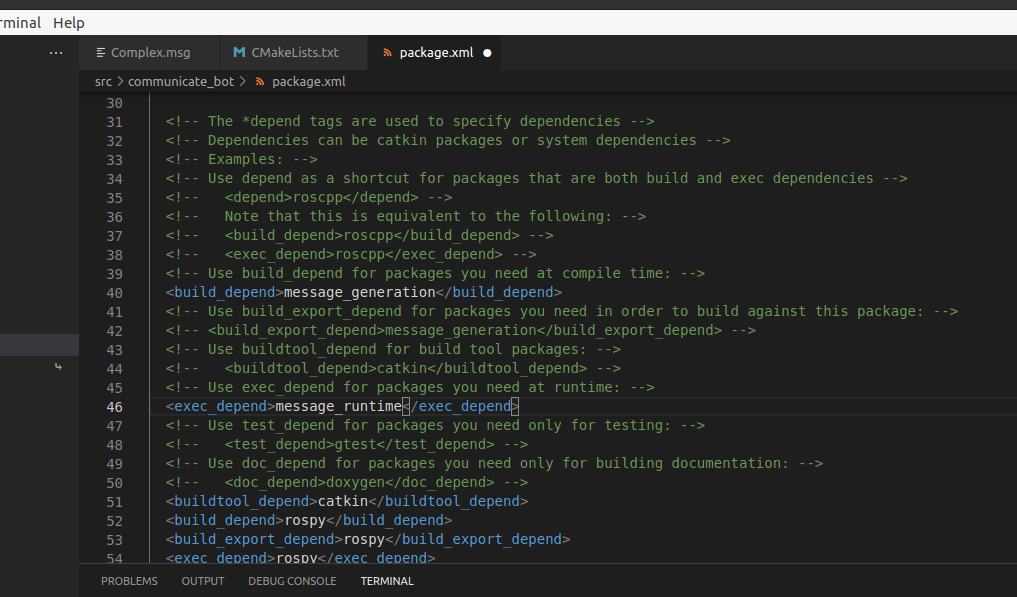
## To declare and build messages, services or actions from within this ## package, follow these steps: ## * Let MSG_DEP_SET be the set of packages whose message types you use in ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...). ## * In the file package.xml: ## * add a build_depend tag for "message_generation" ## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in ## but can be declared for certainty nonetheless: ## * add a exec_depend tag for "message_runtime" ## * In this file (CMakeLists.txt): ## * add "message_generation" and every package in MSG_DEP_SET to ## find_package(catkin REQUIRED COMPONENTS ...) ## * add "message_runtime" and every package in MSG_DEP_SET to ## catkin_package(CATKIN_DEPENDS ...) ## * uncomment the add_*_files sections below as needed ## and list every .msg/.srv/.action file to be processed ## * uncomment the generate_messages entry below ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)