我们这一部分模拟一个低能的阶乘计算器,来比较Service和Action的差异。
碎碎念 :Hello米娜桑,这里是英国留学中的杨丝儿。我的博客技术点集中在机器人、人工智能可解释性、数学、物理等等,感兴趣地点个关注吧,持续高质量输出中。唠嗑QQ群 :兔叽的魔术工房 (942848525)B站账号 :杨丝儿今天也在科学修仙 (UP主跨站求个关注)
本系列用时9天,博主也是从零开始,尽力去写的,如果发现了错误一定要私信告诉我呀。这么努力的博主,关注一下吧。
:star:案例目标
说明以下问题
ROS中message,action,service的定义方式大同小异。
在消息作为一等公民的ROS软件中,灵活使用面向对象思想。
文件的命名问题,很多文件的命名是很有讲究的,节点名也是。
ROS使用大量多线程并行的思想,需要理解并行与并发、python的主锁以及阻塞和上锁的区别。
:star:准备工作
基础步骤参见:【机器人】ROS程序框架:架构部分
创建factorial_calculator包
:star:服务部分
:sparkles:定义文件
创建一个名为FactorialService.srv,定义输入和输出
1 2 3 uint32 num_in --- uint32 num_out
取消package.xml中的注释
添加信息到CMakeLists.txt
1 2 3 4 5 find_package (catkin REQUIRED COMPONENTS rospy std_msgs message_generation )
1 2 3 4 5 add_service_files( FactorialService.srv )
取消CMakeLists.txt中的注释
使用$catkin_make编译
:sparkles:使用服务
客户端factorial_service_client.py代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 import rospyfrom factorial_calculator.srv import FactorialService class FactorialServiceClient (): def __init__ (self ): rospy.init_node('service_client_factorial' ) rospy.wait_for_service('service/server/factorial/service' ) self .factorise = rospy.ServiceProxy('service/server/factorial/service' , FactorialService) def call (self,num ): return self .factorise(num).num_out if __name__ == '__main__' : client = FactorialServiceClient() while input_num := input ("Input a num: " ): if not input_num.isdigit(): continue input_num = int (input_num) result = client.call(input_num) print (f"Result is: {result} " )
服务端factorial_service_server.py代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 import rospyfrom factorial_calculator.srv import FactorialService,FactorialServiceResponseclass FactorialServiceServer (): def __init__ (self ): rospy.init_node('service_server_factorial' ) def factorise (self,num ): result = 1 for i in range (1 ,num+1 ): result *= i rospy.sleep(0.2 ) print (result) return result def run (self ): service = rospy.Service('service/server/factorial/service' , FactorialService, lambda x : FactorialServiceResponse(self .factorise(x.num_in))) rospy.spin() if __name__ == '__main__' : server = FactorialServiceServer() server.run()
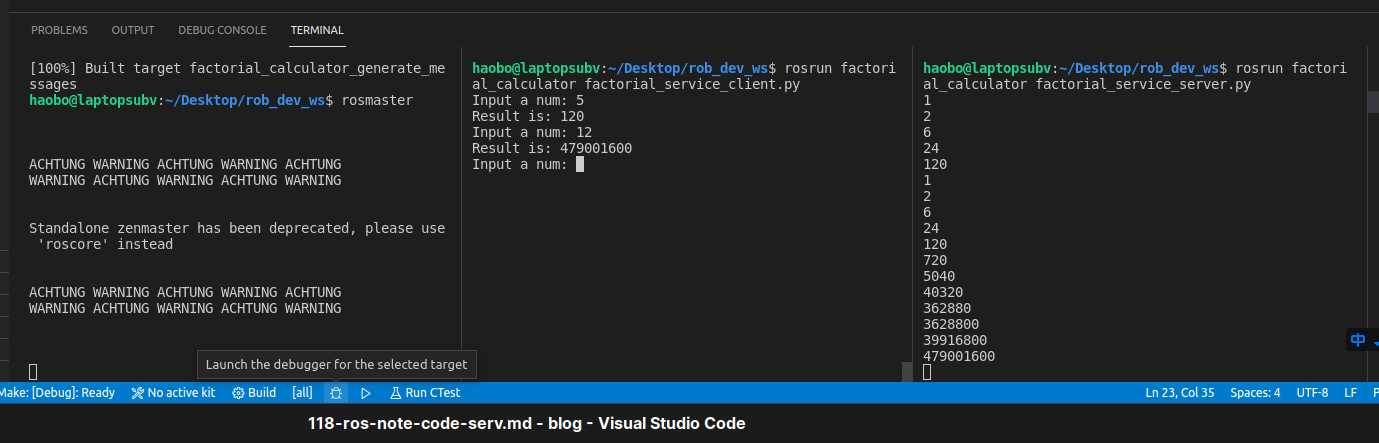
:sparkles:效果
:star:动作部分
:sparkles:定义文件
创建一个名为FactorialAction.action
1 2 3 4 5 uint32 num_in --- uint32 num_process --- uint32 num_out
在package.xml添加信息
1 2 <build_depend > actionlib_msgs</build_depend > <exec_depend > actionlib_msgs</exec_depend >
CMakeLists.txt
1 2 3 4 5 add_action_files( FactorialAction.action )
添加actionlib_msgs依赖
1 2 3 4 5 6 find_package (catkin REQUIRED COMPONENTS rospy std_msgs actionlib_msgs message_generation )
1 2 3 4 5 generate_messages( DEPENDENCIES std_msgs actionlib_msgs )
1 2 3 4 5 6 7 catkin_package( # INCLUDE_DIRS include # LIBRARIES factorial_calculator # CATKIN_DEPENDS rospy # DEPENDS system_lib actionlib_msgs # 新增 )
$catkin_make
:sparkles:使用服务
客户端factorial_action_client.py代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 import rospyimport actionlibfrom factorial_calculator.msg import FactorialActionAction,FactorialActionGoal,FactorialActionResultclass FactorialActionClient (): def __init__ (self ): rospy.init_node('action_client_factorial' ) self .client = actionlib.SimpleActionClient('action/server/factorial/action' , FactorialActionAction) self .client.wait_for_server() def feedback_callback (self,feedback ): if int (feedback)>100000 : self .client.cancel_goal() print ('Feedback:' , feedback) def call (self,num ): goal = FactorialActionGoal() goal.num_goal = num self .client.send_goal(goal, feedback_cb=lambda x : self .feedback_callback(x.num_feedback)) self .client.wait_for_result() return self .client.get_result().num_result if __name__ == '__main__' : client = FactorialActionClient() while input_num := input ("Input a num: " ): if not input_num.isdigit(): continue input_num = int (input_num) result = client.call(input_num) print (f"Result is: {result} " )
服务端factorial_action_server.py代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 import rospyimport actionlibfrom factorial_calculator.msg import FactorialActionAction,FactorialActionGoal,FactorialActionResult,FactorialActionFeedbackclass FactorialActionServer (): def __init__ (self ): rospy.init_node('action_server_factorial' ) self .server = actionlib.SimpleActionServer('action/server/factorial/action' , FactorialActionAction, lambda x : self .factorise(x.num_goal), auto_start=False ) def factorise (self,num ): result = 1 if num > 14 : self .server.set_aborted(FactorialActionResult(result),'[aborted]' ) return for i in range (1 ,num+1 ): if self .server.is_preempt_requested(): self .server.set_preempted(FactorialActionResult(result),'[preempted]' ) result *= i rospy.sleep(0.2 ) self .server.publish_feedback(FactorialActionFeedback(result)) self .server.set_succeeded(FactorialActionResult(result)) return def run (self ): self .server.start() rospy.spin() if __name__ == '__main__' : server = FactorialActionServer() server.run()
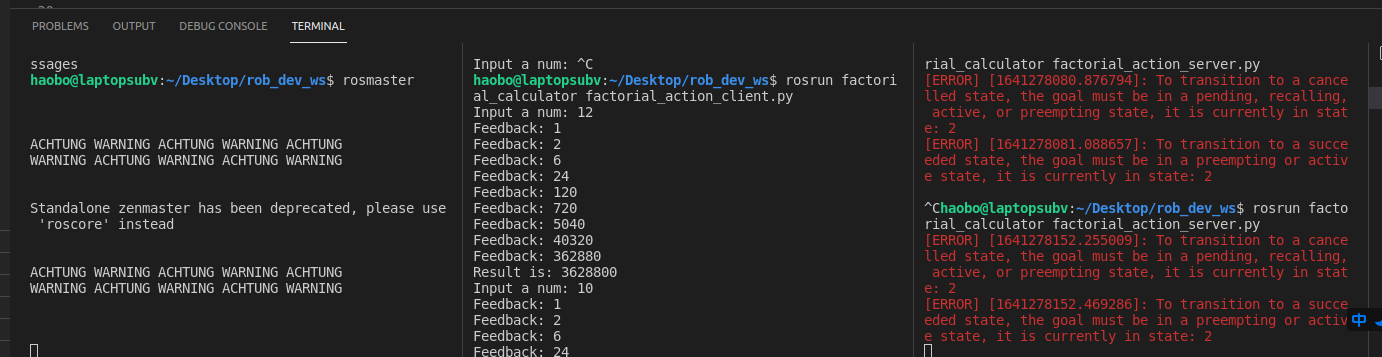
:sparkles:效果