手把手教你搭建一个传递数字消息的机器人程序。
:sparkles:注意
本文只提供在Linux平台上的代码演示和最基本的注释,不进行逻辑的解释。
相关解释以及需要用到的基础知识参见:【机器人】ROS程序框架:架构部分
:sparkles:安装ROS1环境
需要用到的技术以及流程参见:【机器人】开发系统镜像制作指南
:sparkles:搭建环境
1 | cd ~/Desktop |
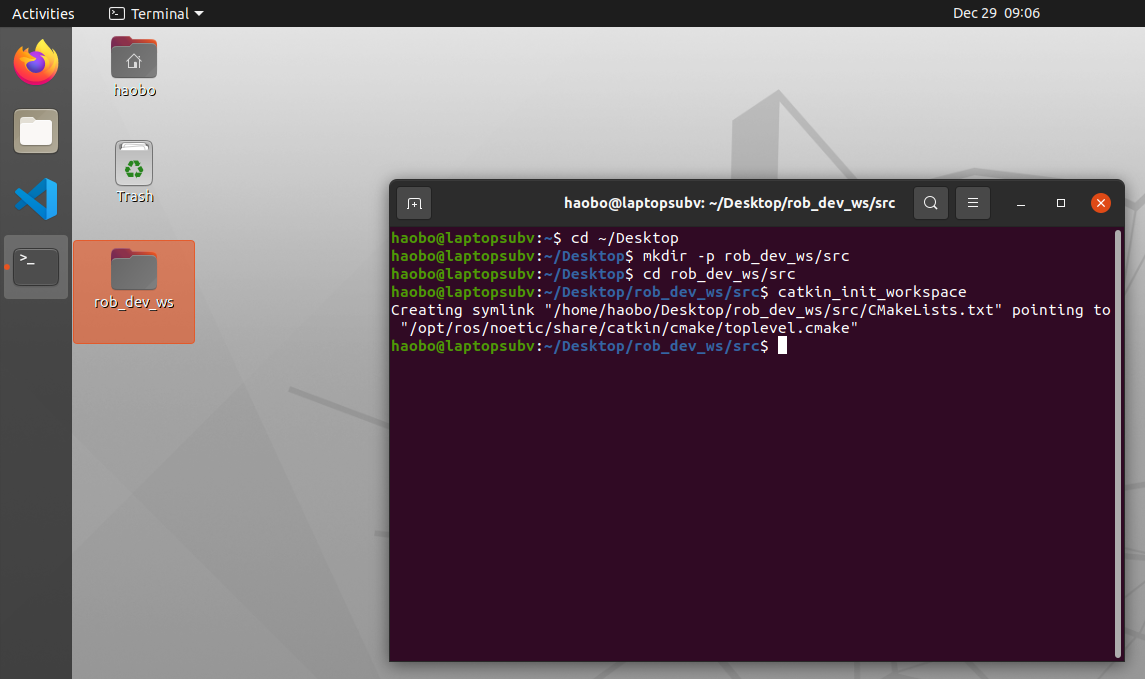
:sparkles:创建包
在src路径下执行
1 | 这里使用python,所以我们依赖 rospy |
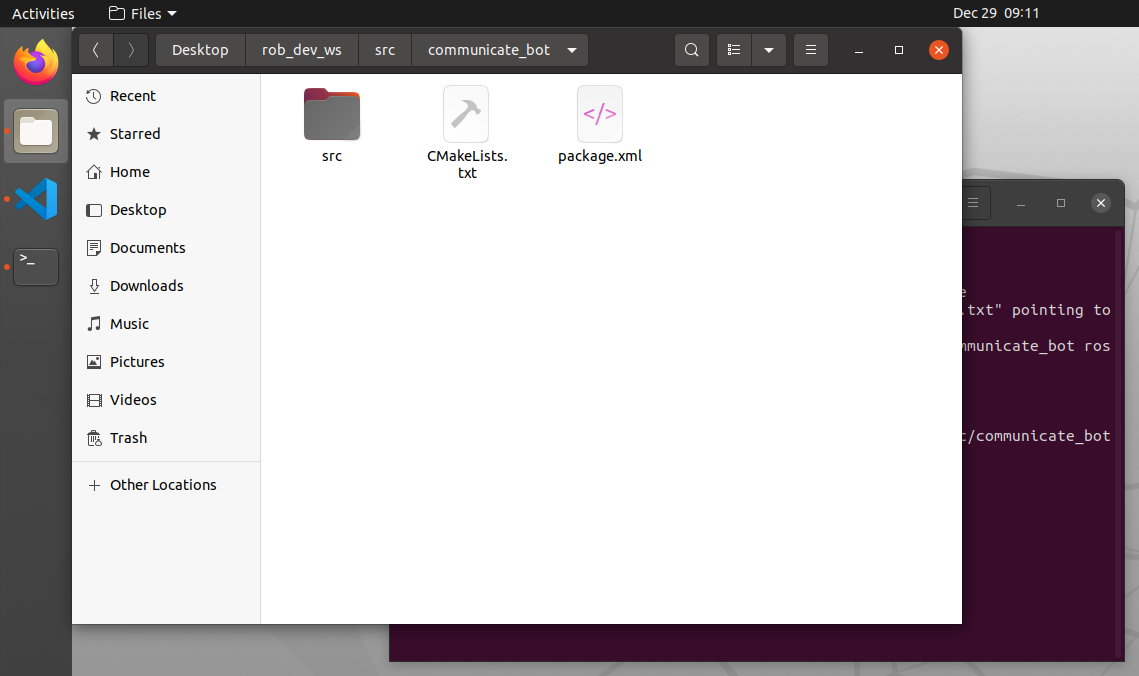
:sparkles:开始编程
包内src路径下放置我们的代码。
首先是发送端,文件名叫做:topic_publisher.py
1 | #!/usr/bin/env python3 |
我们采用面向对象的思想进行编程,方便未来增改需求。
接下来是接收端,文件名称叫做topic_subscriber.py
1 | #!/usr/bin/env python3 |
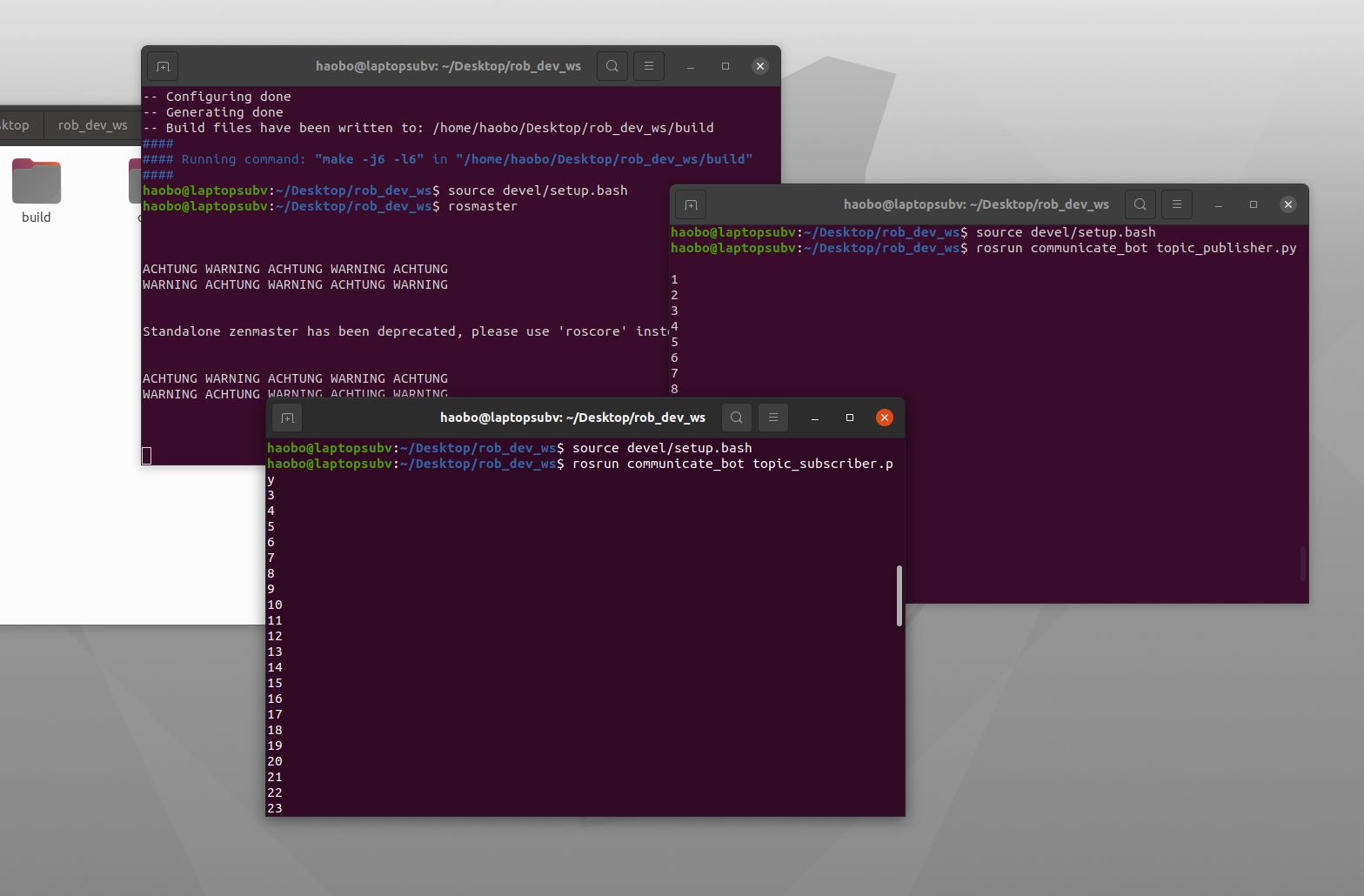
:sparkles:对程序/包进行编译
在工作区文件夹执行
1 | catkin_make |
:sparkles:运行程序
在工作区目录进行以下操作:
第一个终端执行
1
rosmaster
第二个终端执行
1
2
source devel/setup.bash
rosrun communicate_bot topic_publisher.py
第三个终端执行
1
2
source devel/setup.bash
rosrun communicate_bot topic_subscriber.py
1 | rosmaster |
1 | source devel/setup.bash |
1 | source devel/setup.bash |
:sparkles:退出程序
Ctrl+C退出每一个终端中的程序
下一篇会涉及自定义消息类型的项目,链接在这里:TODO正在施工中








