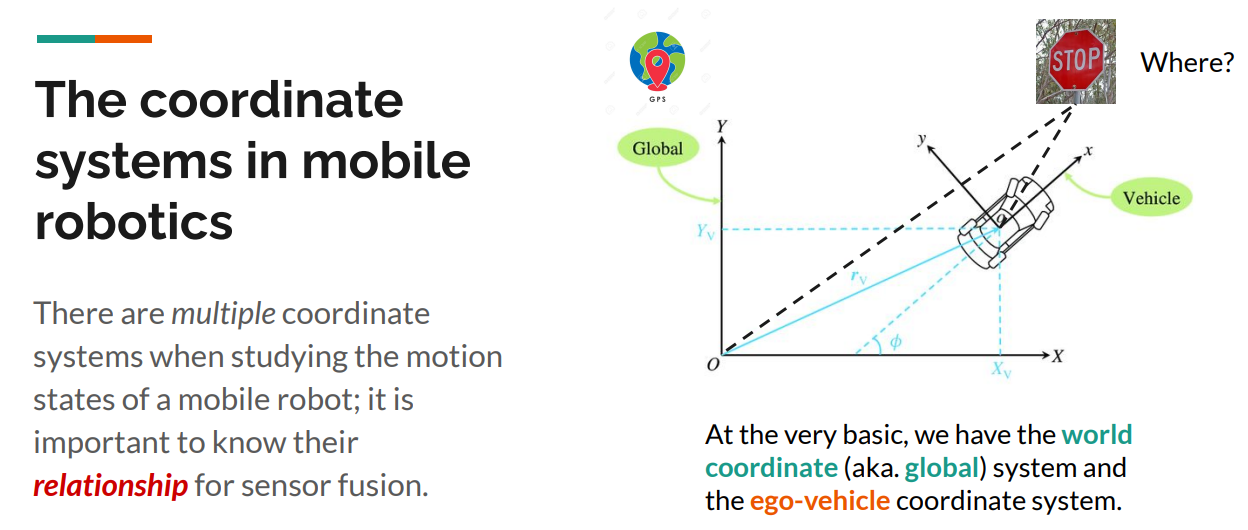
The coordinate systems in mobile robotics
- world coordinate system
- ego-vehicle coordinate system
Rigid Body Assumption
Rigid Body is a solid body in which deformation is zero or so small it can be neglected.
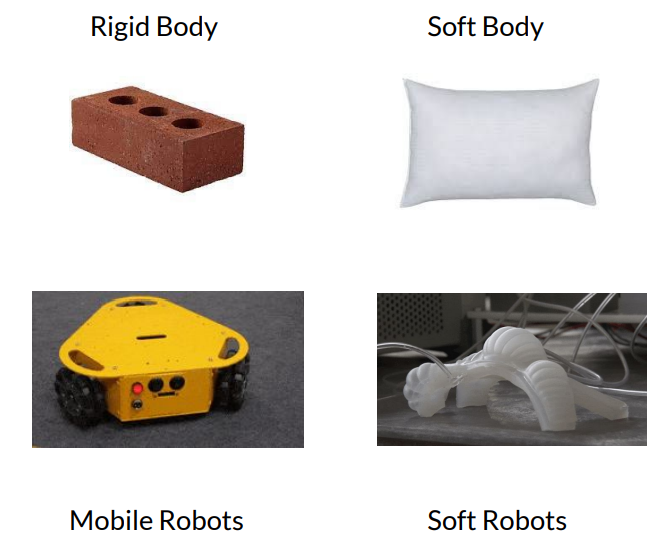
rigid body assumption implied that movement of a sensor mounted on the robot should be the same as other co-located sensors and the whole platform.
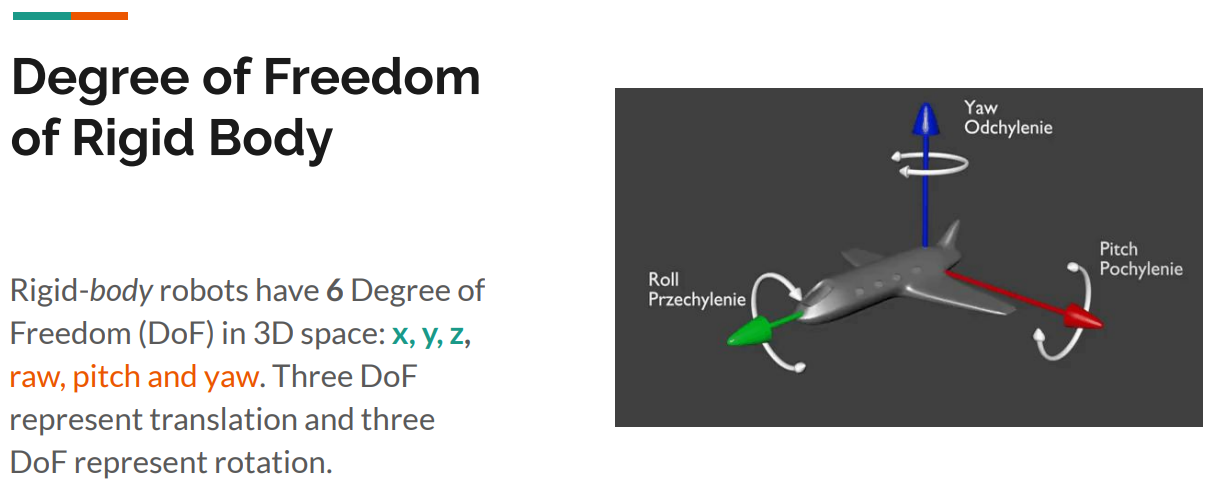
Motion in general
Motion that can be described by a rotation and translation. There are 6 degree of freedom (DoF) in 3D space for rigid body.
Coordinate transformation
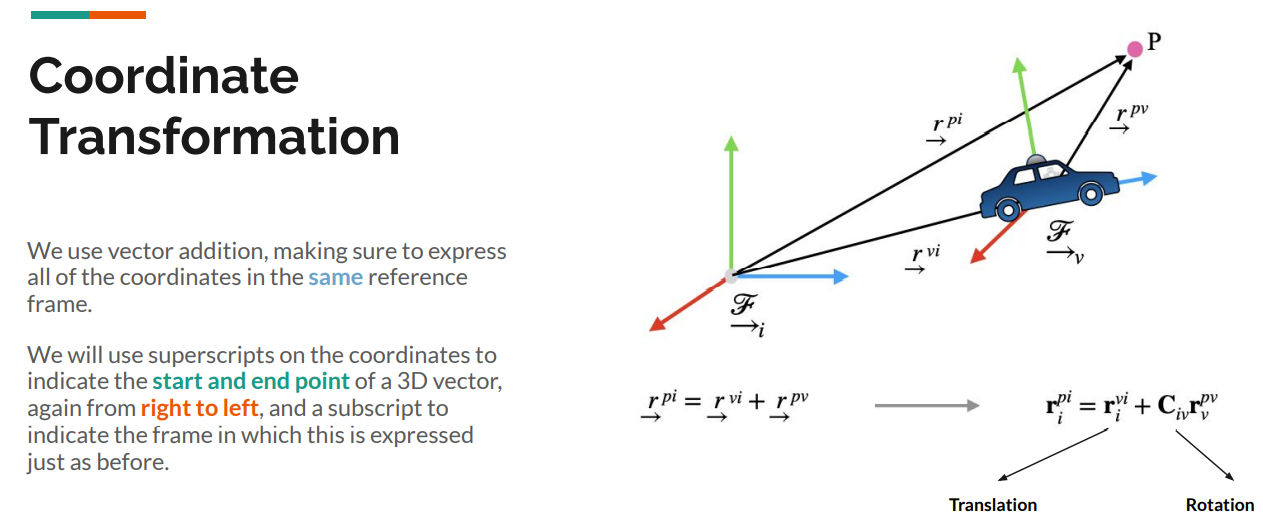
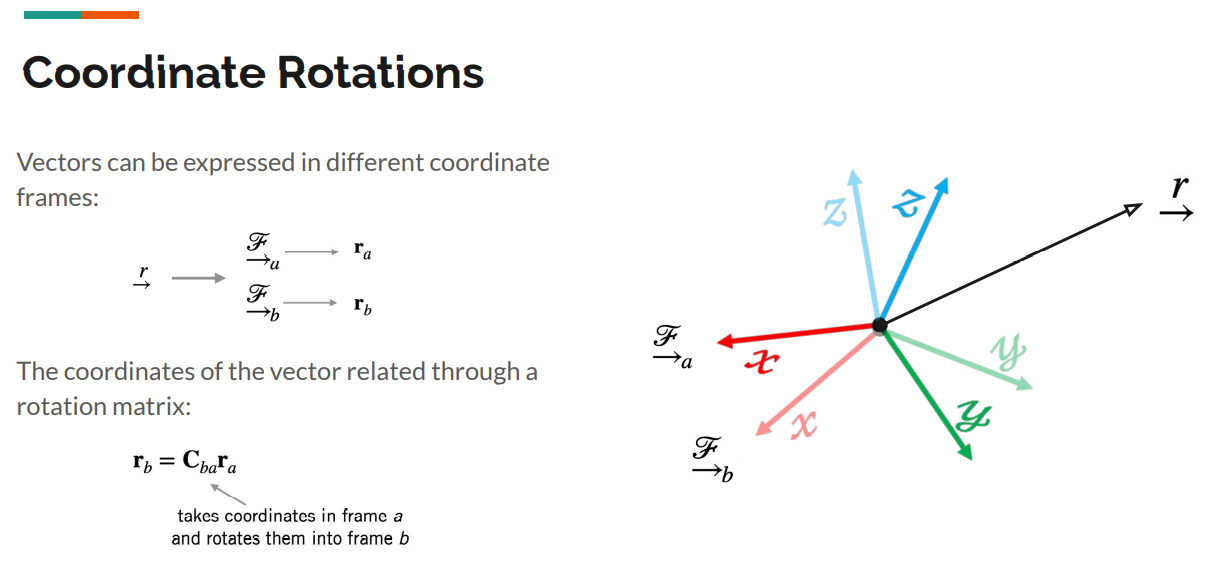
Rotation
rotation matrix
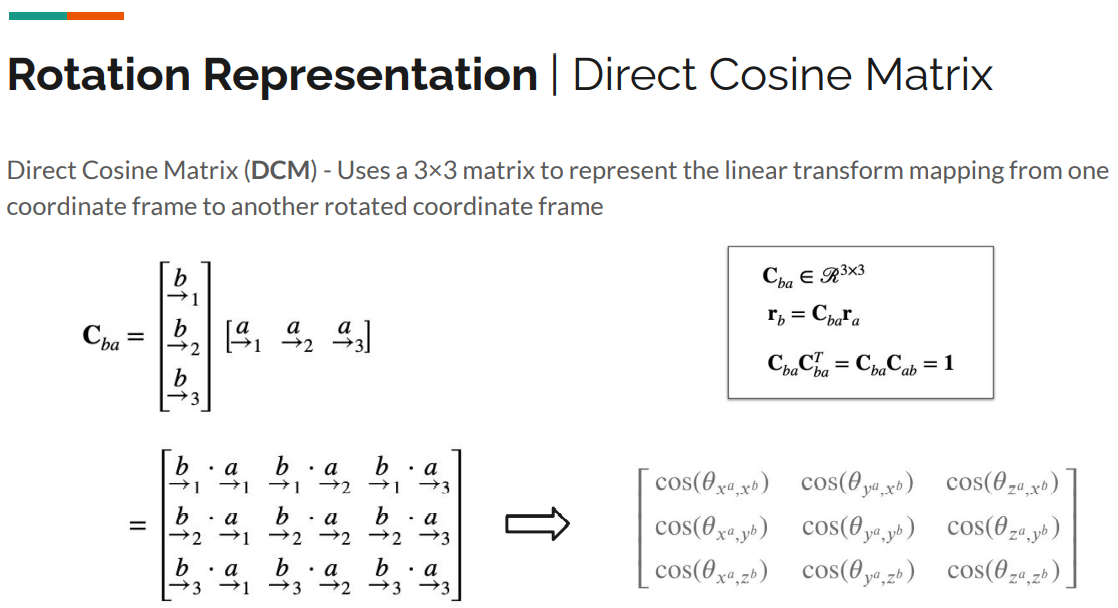
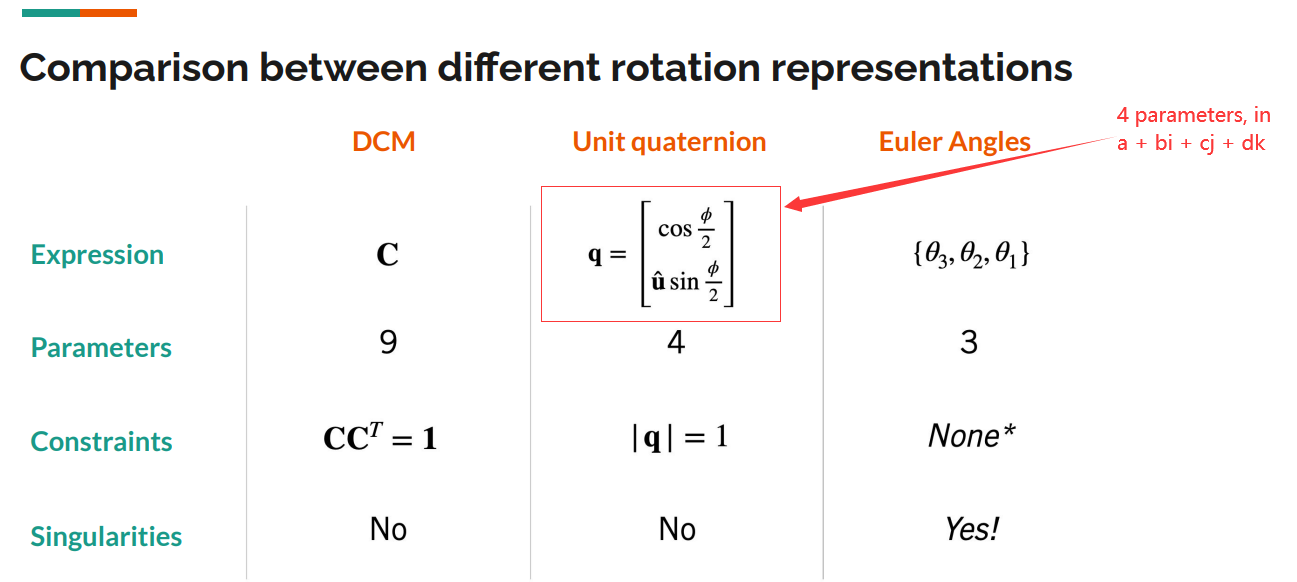
Direct Cosine Matrix
Direct Cosine Matrix (DCM), unit vectors, 3 assumptions
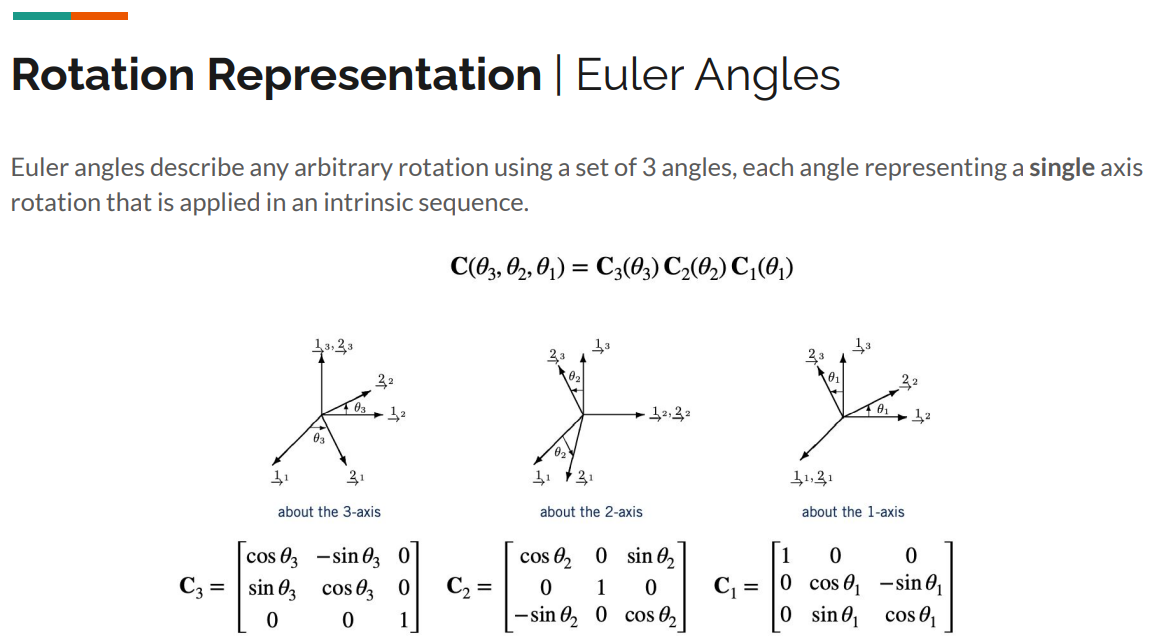
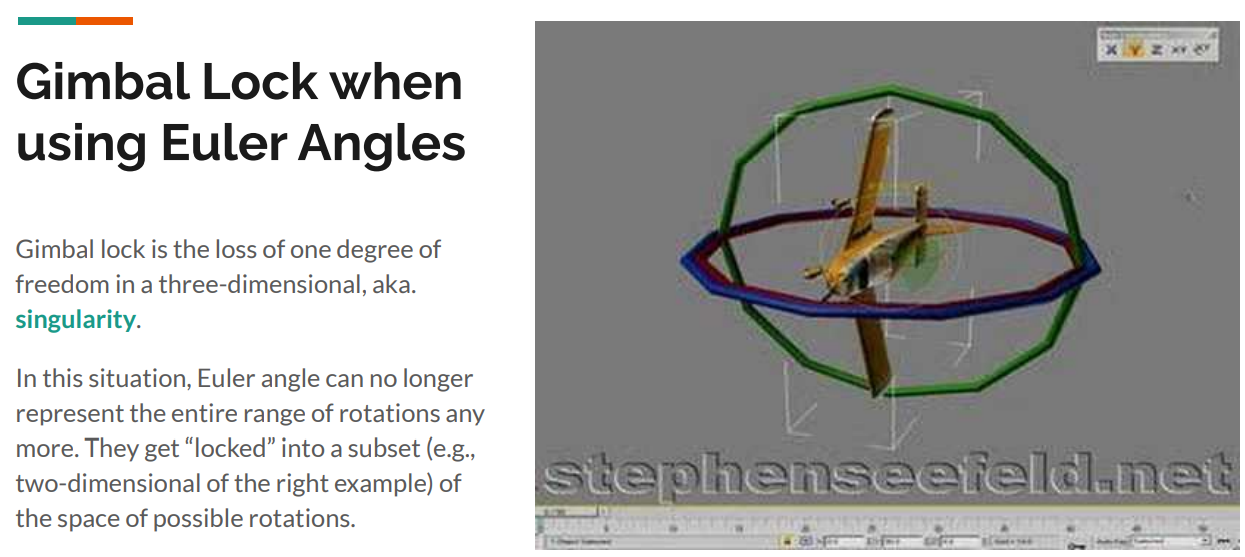
Eular Angles
Euler Angles, single axis rotation, in an intrinsic sequence (X, Y, Z).
Gimbal lock, loss of one DoF, cause singularity.
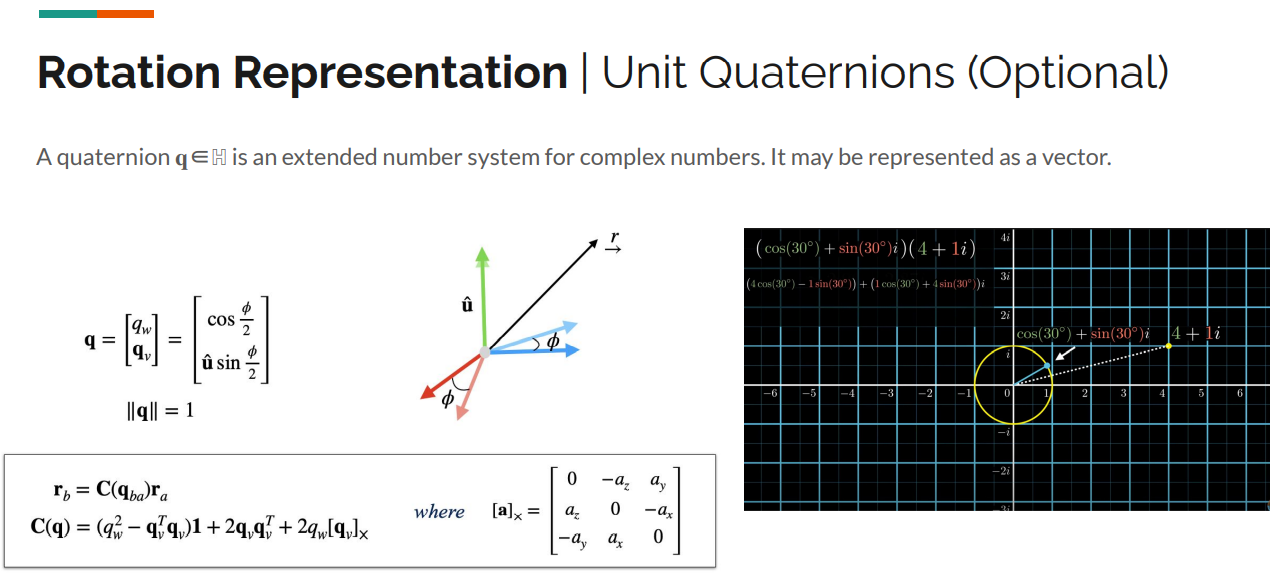
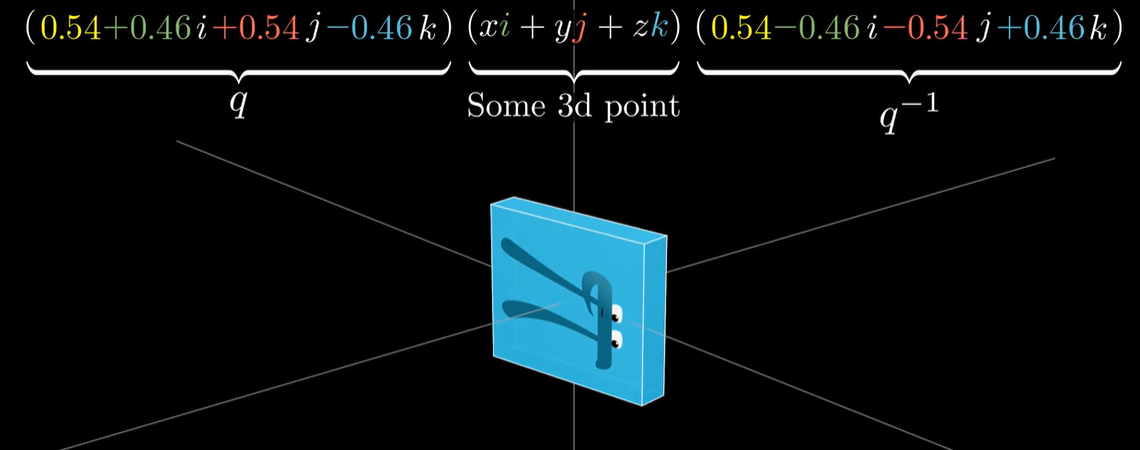
Quaternions
Quaternions and 3d rotation, explained interactively
Small summary
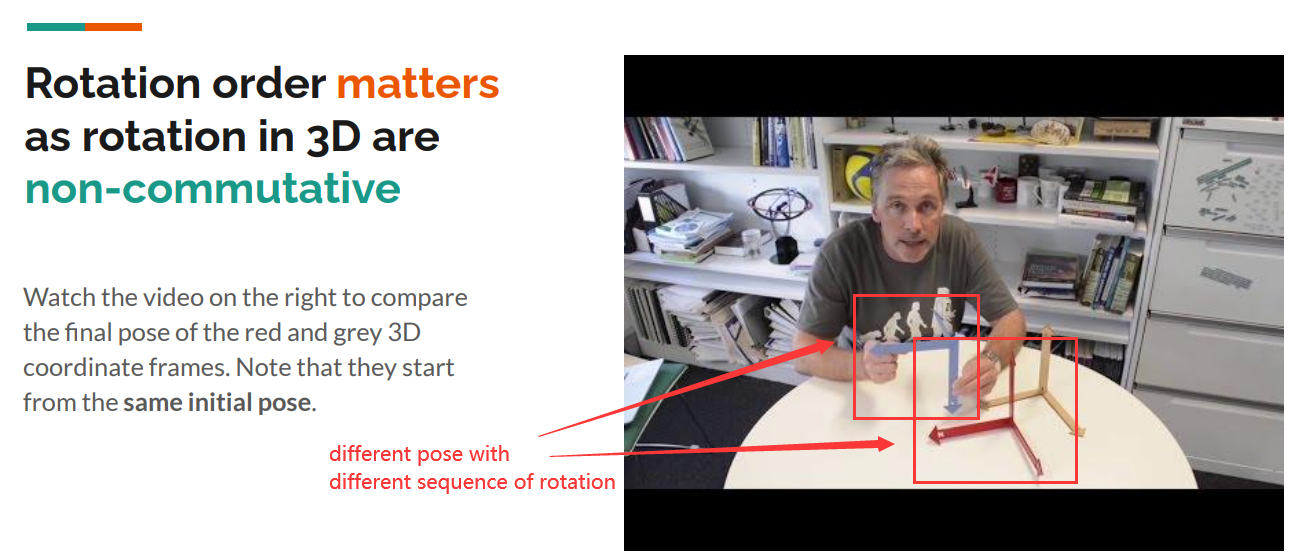
Order of rotation, rotation in 3D are non-commutative.
Reference Frame
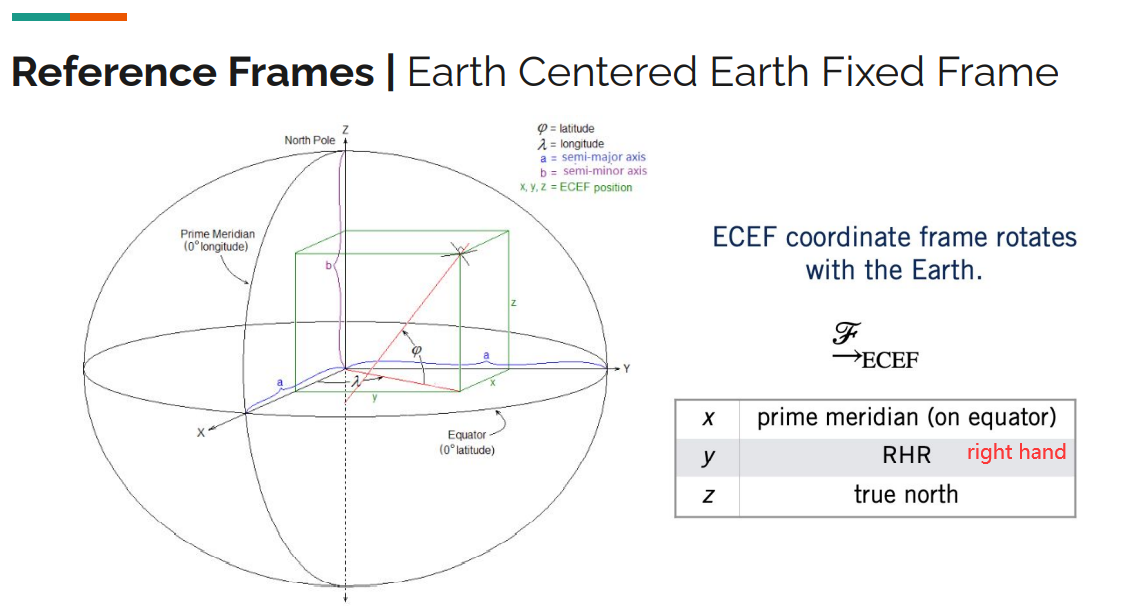
Earth Centered Earth Fixed Frame
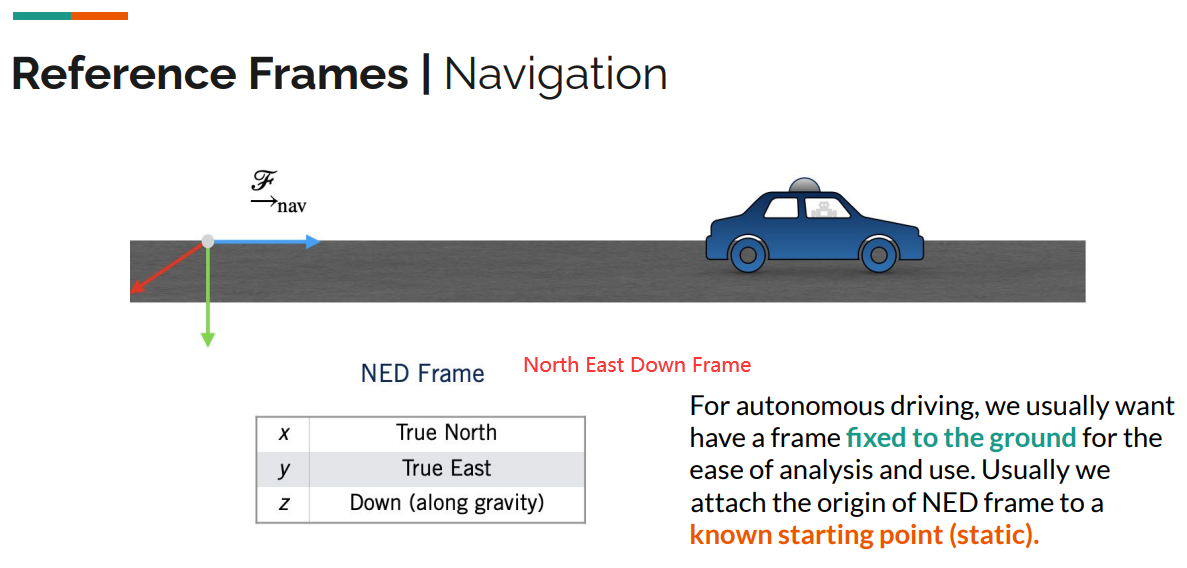
North East Down Frame
North East Down (NED) frame
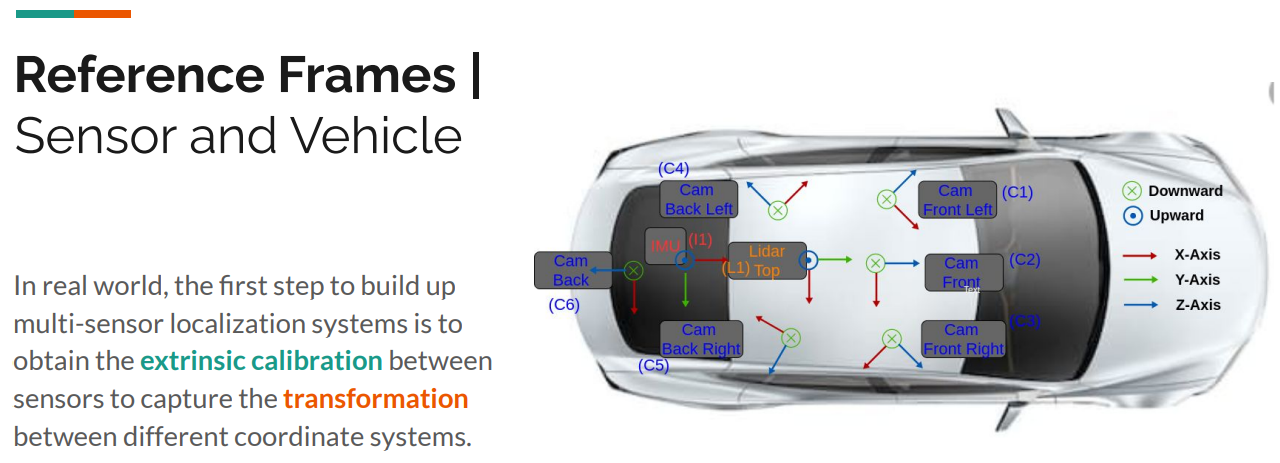
Sensors’ frame
GNSS
Global Positioning System
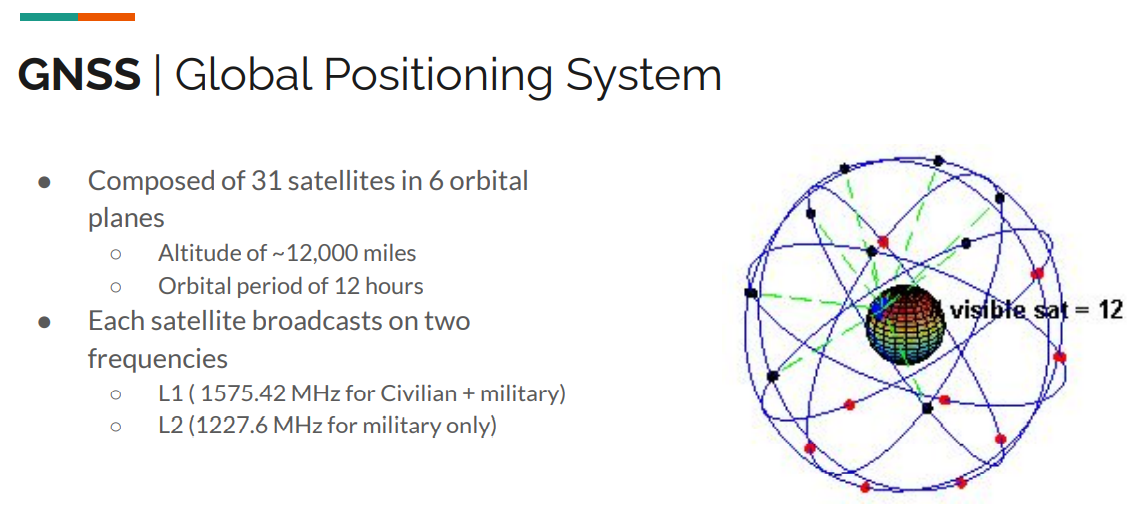
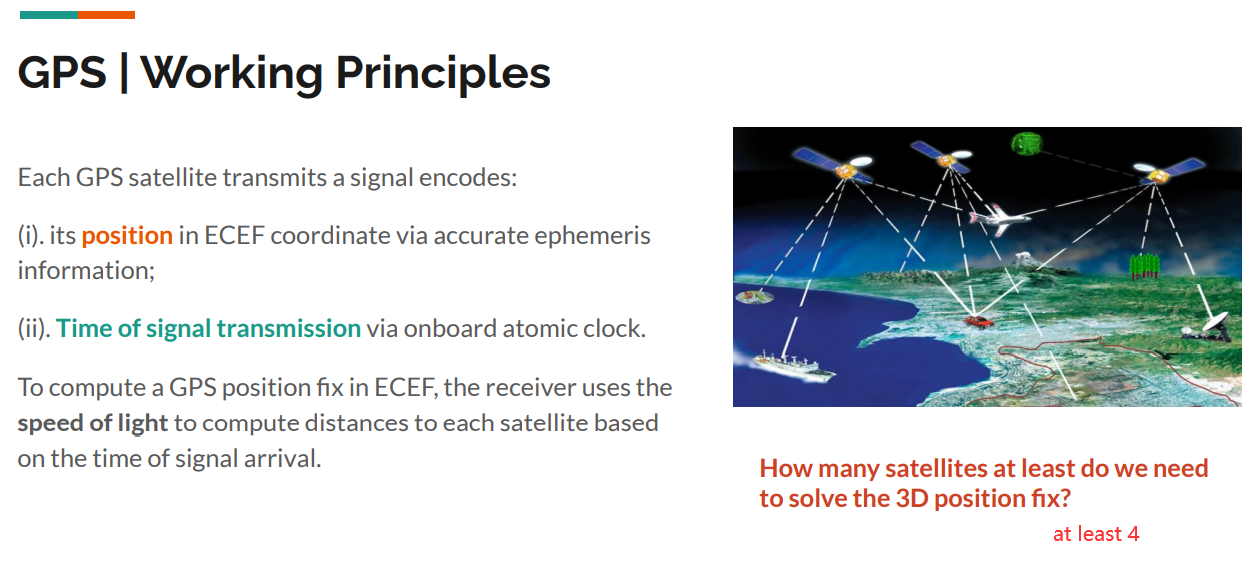
Position in ECEF coordinate via accurate ephemeris information. Time of signal transmission via onboard atomic clock.
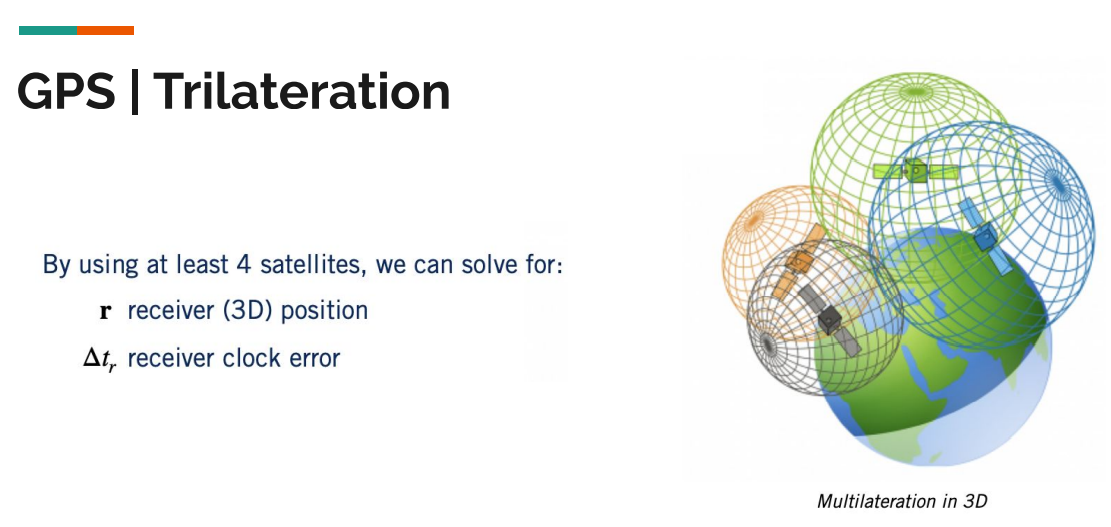
Reducing uncertainty every time we add a new circle.
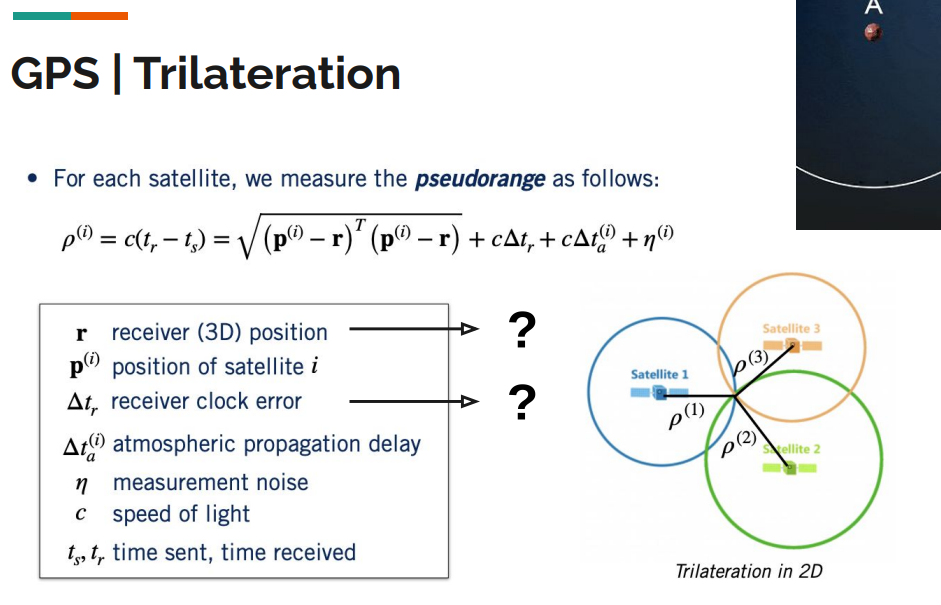
In this case we have sphere.
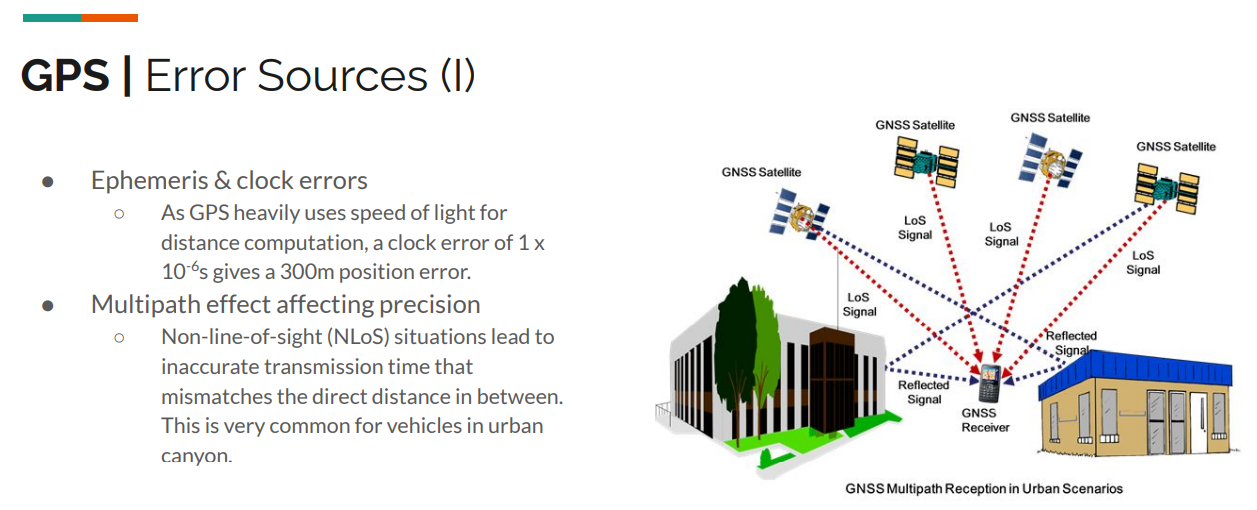
Ephemeris & clock errors, Multipath effect affecting precision
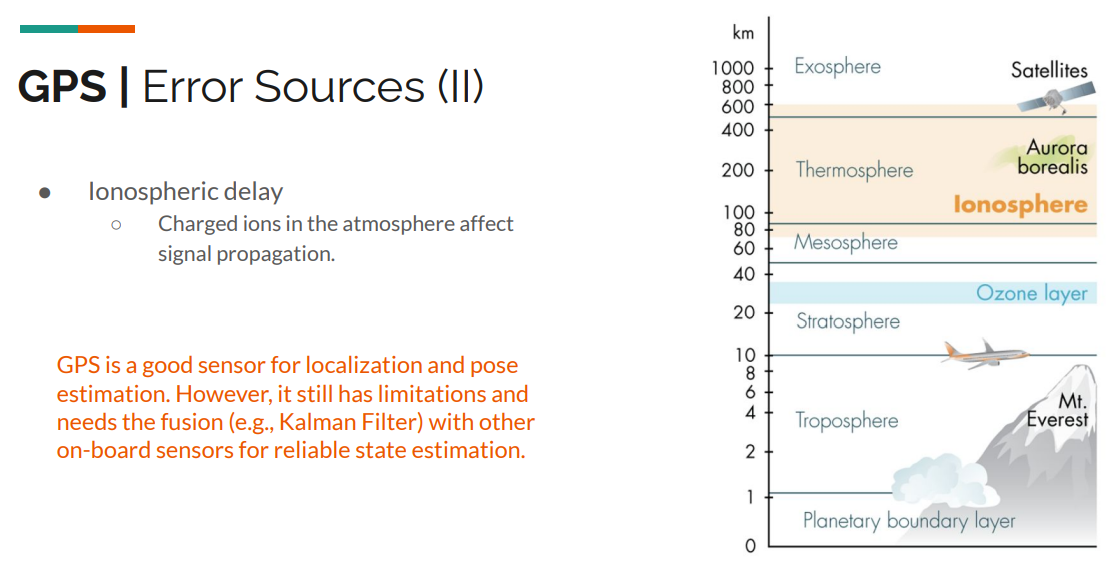
ionosphere delay
Future Reading
- Understanding Direct Cosine Matrices, Euler Angles and Quaternions.
- Representing Robot Pose: The good, the bad, and the ugly.
- Rethinking GPS: Engineering Next-Gen Location at Uber
Origin: Dr. Chris Lu (Homepage)
Translate + Edit: YangSier (Homepage)
:four_leaf_clover:碎碎念:four_leaf_clover:
Hello米娜桑,这里是英国留学中的杨丝儿。我的博客的关键词集中在编程、算法、机器人、人工智能、数学等等,点个关注吧,持续高质量输出中。
:cherry_blossom:唠嗑QQ群:兔叽的魔术工房 (942848525)
:star:B站账号:白拾Official(活跃于知识区和动画区)


