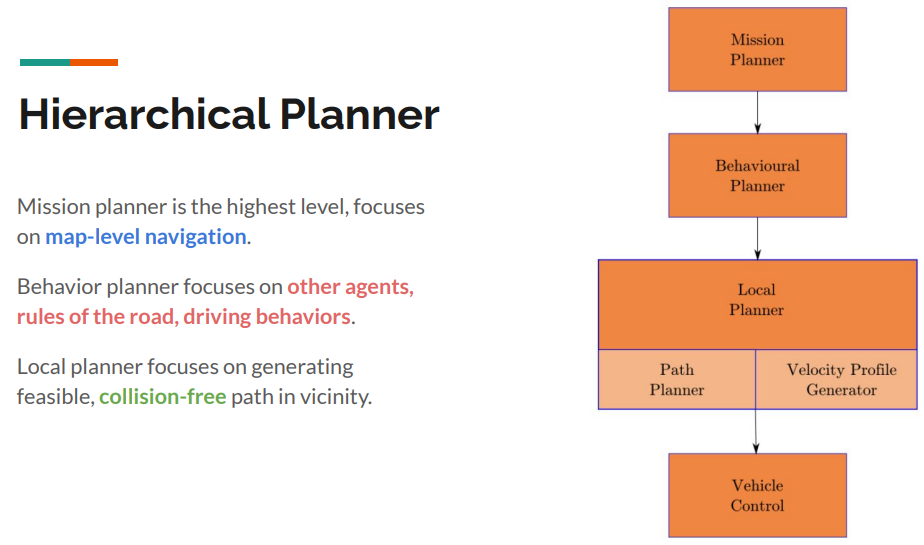
Mission, scenarios and behaviors
Task: Navigate the robot itself from the current position to final destination on the map, without human intervention.
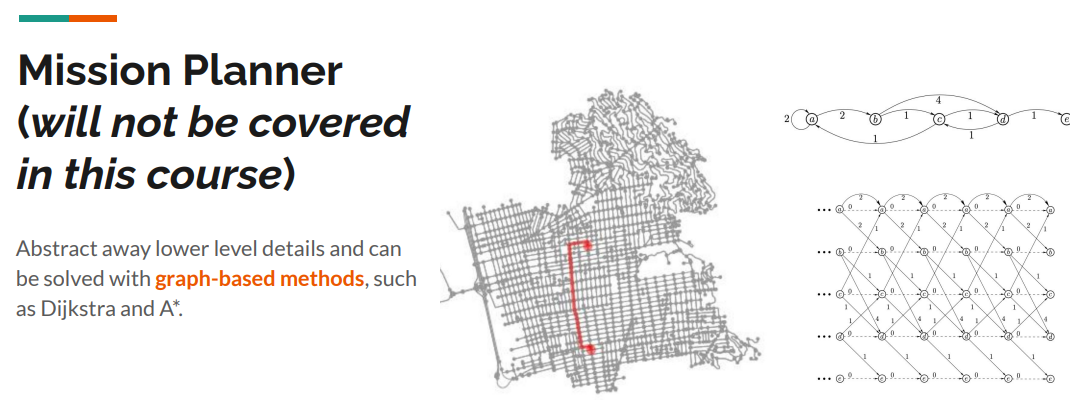
Goal: find most efficient path (trajectory) in terms of time or distance travelled.
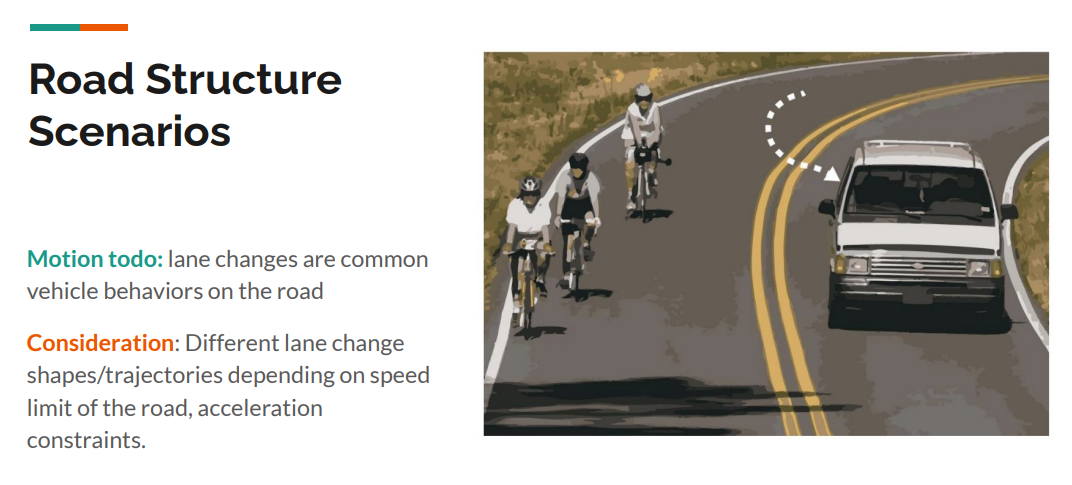

Example Common Behavior Sets
- Speed tracking
- Deceleration to stop
- Stay stopped
- Yield
- Emergency stop
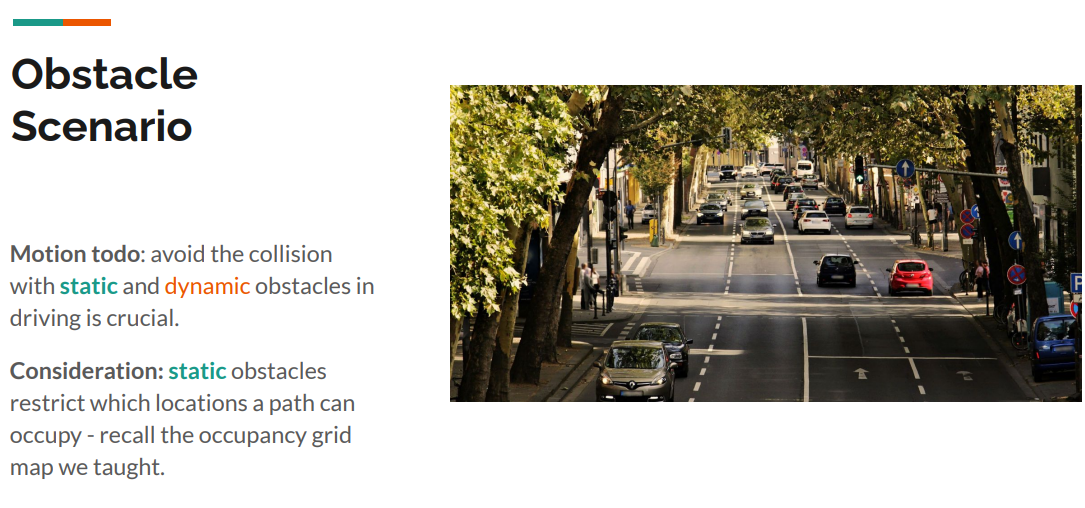
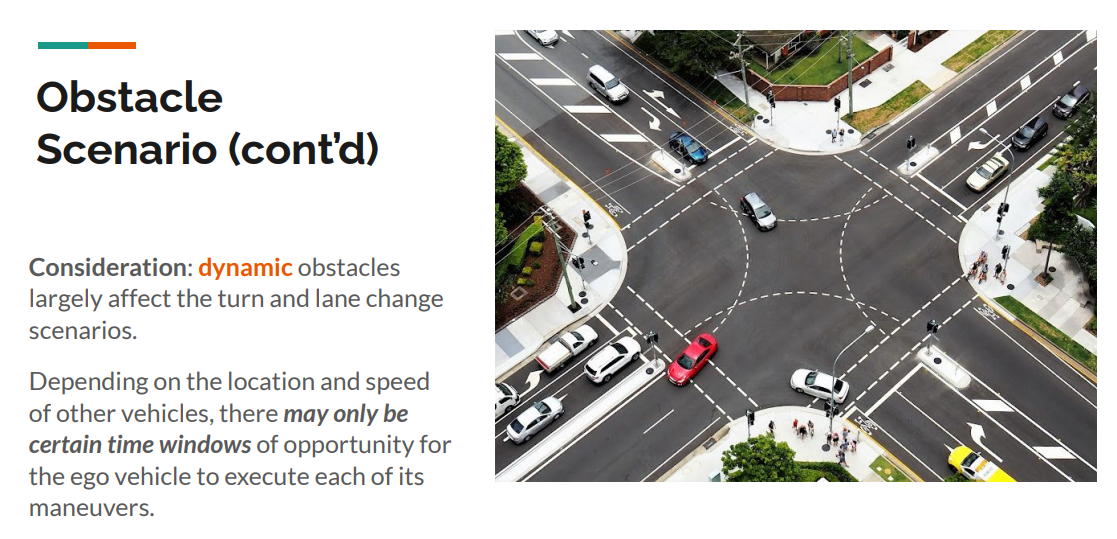
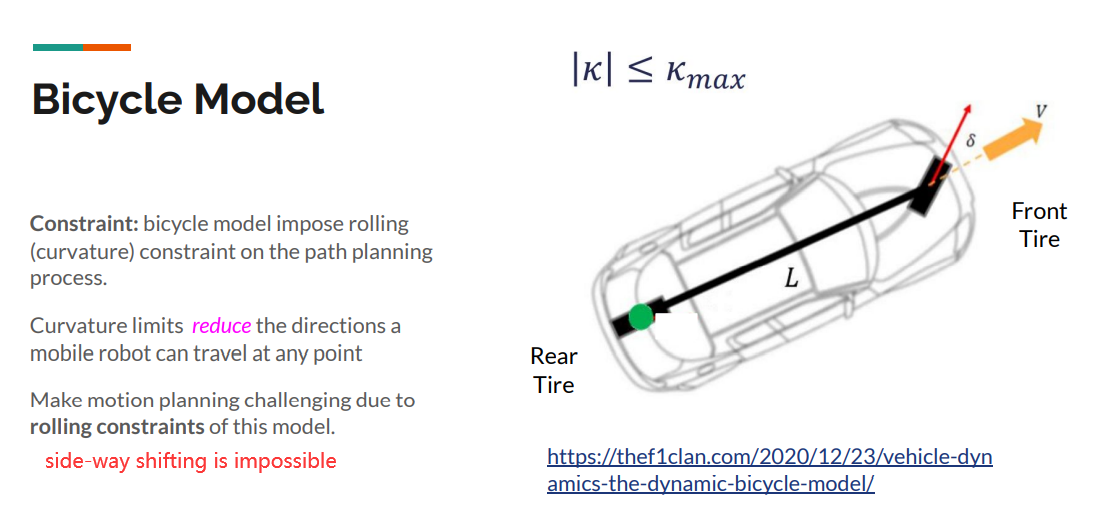
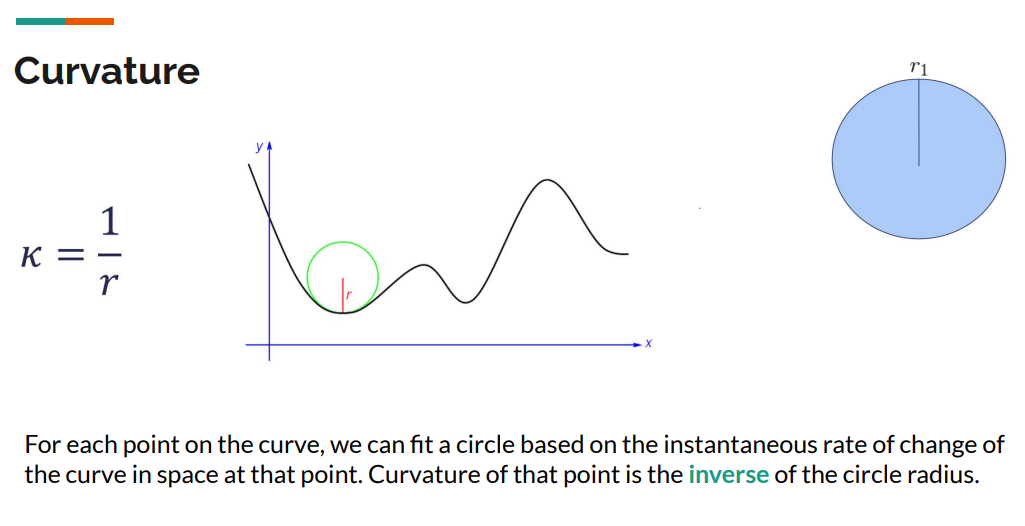
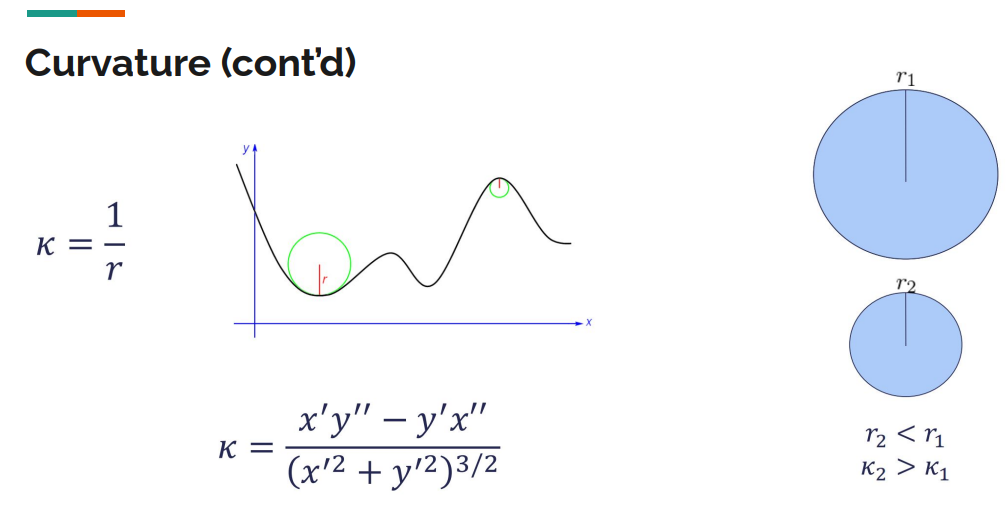
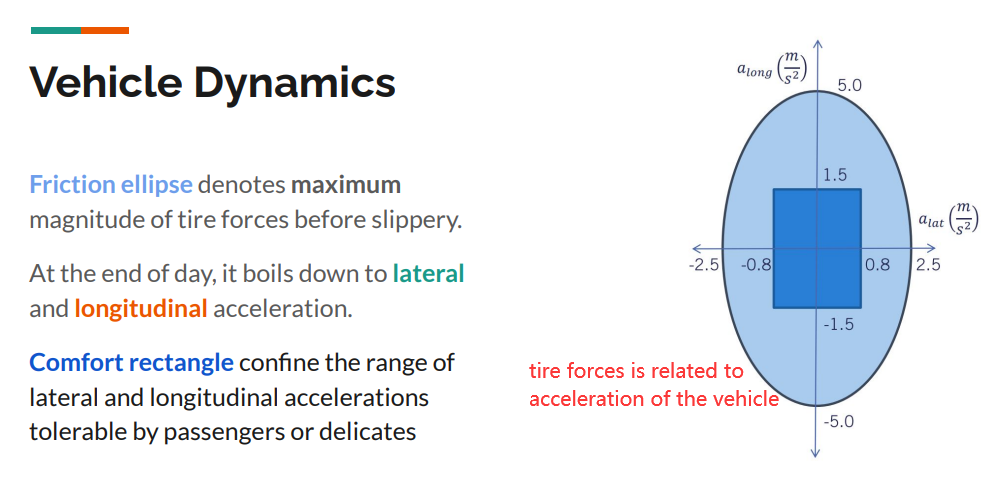
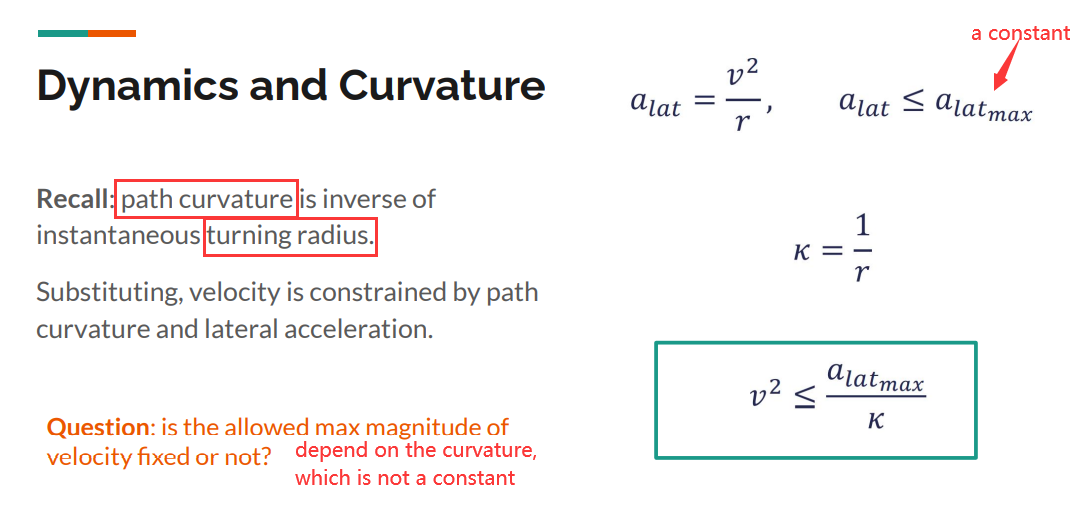
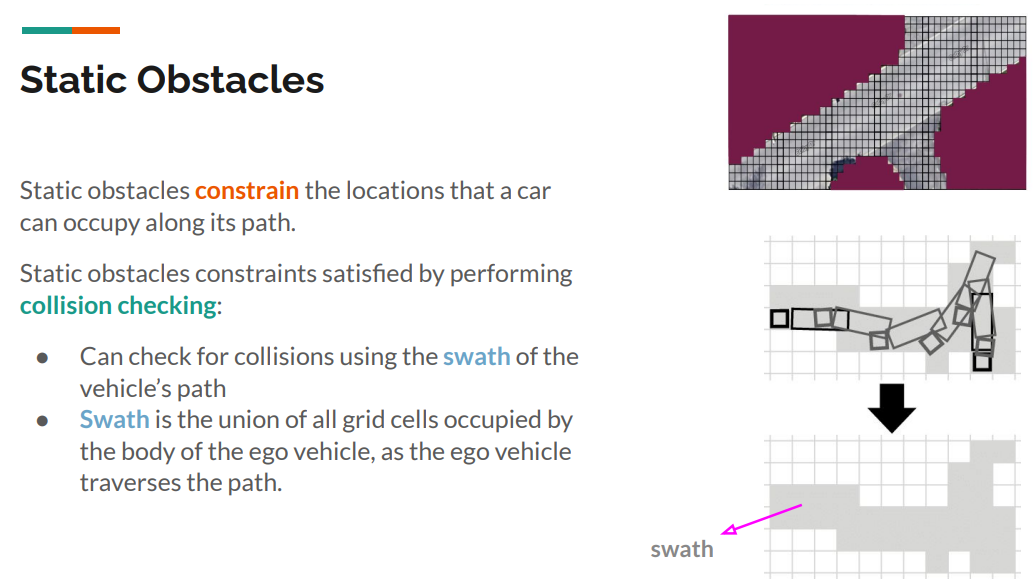
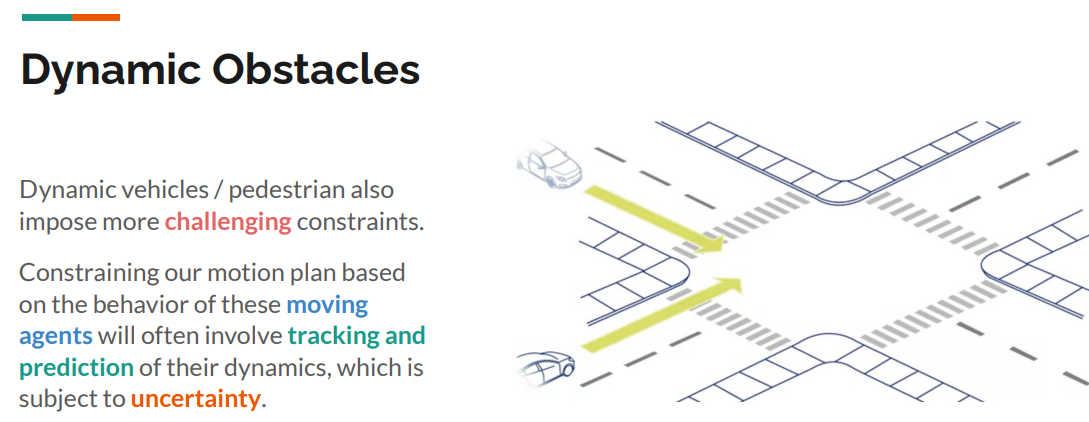
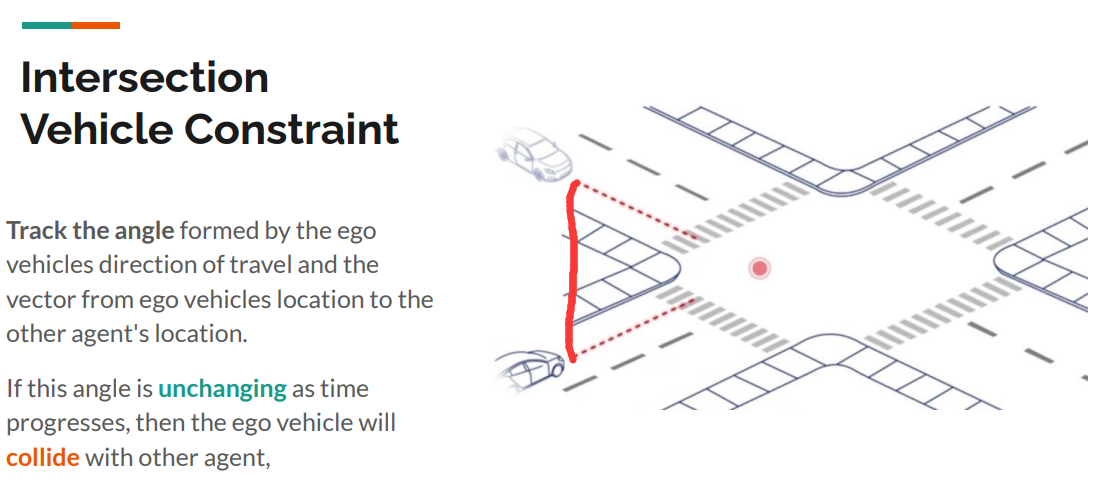
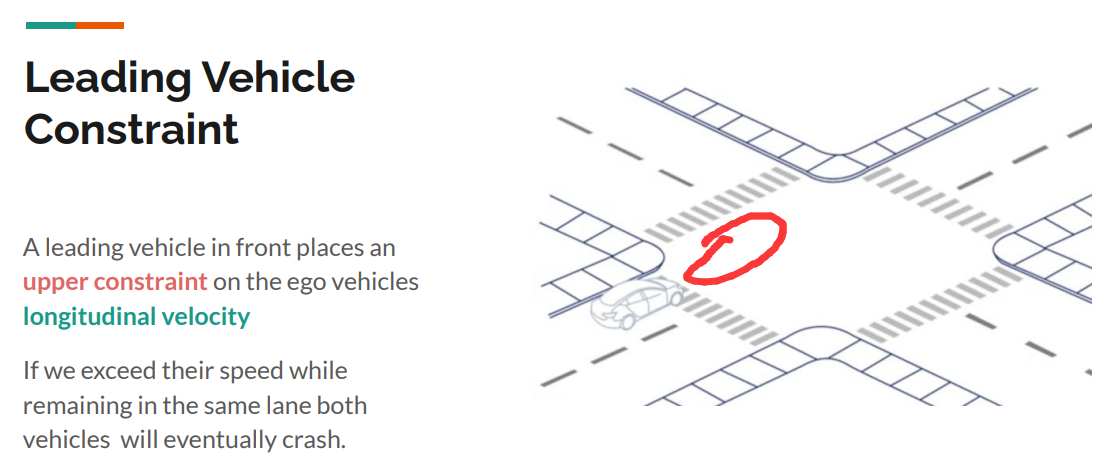
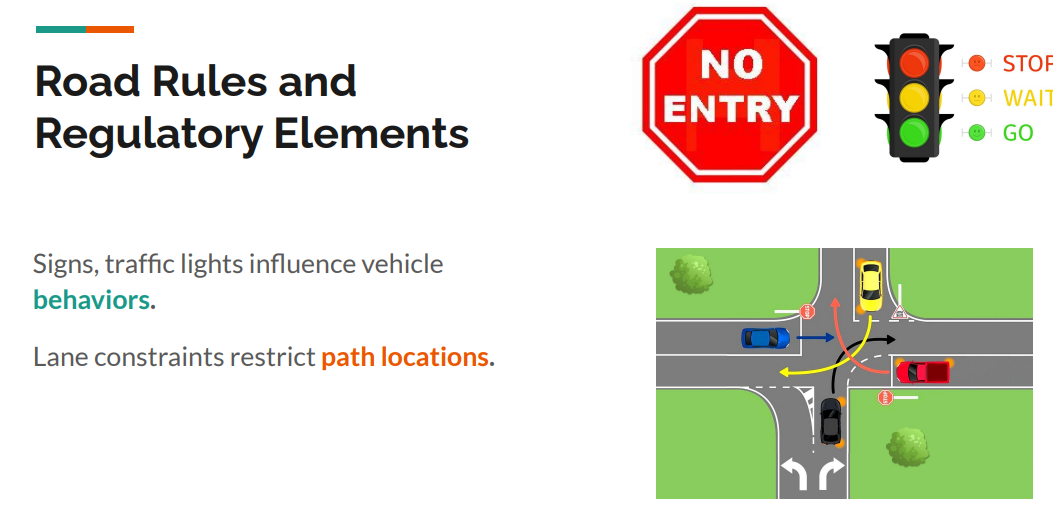
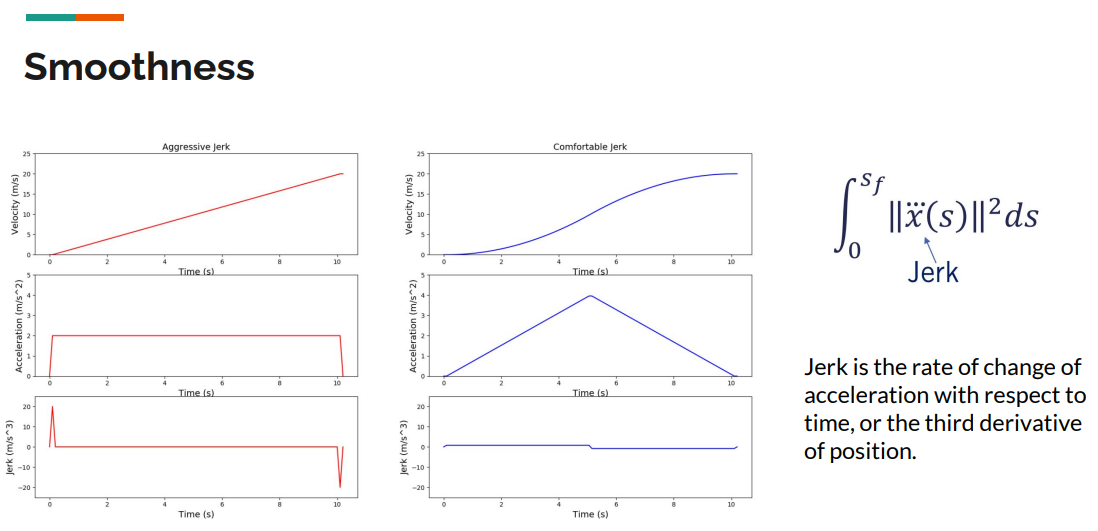
Motion planning constraints
Read more about vehicle dynamic.
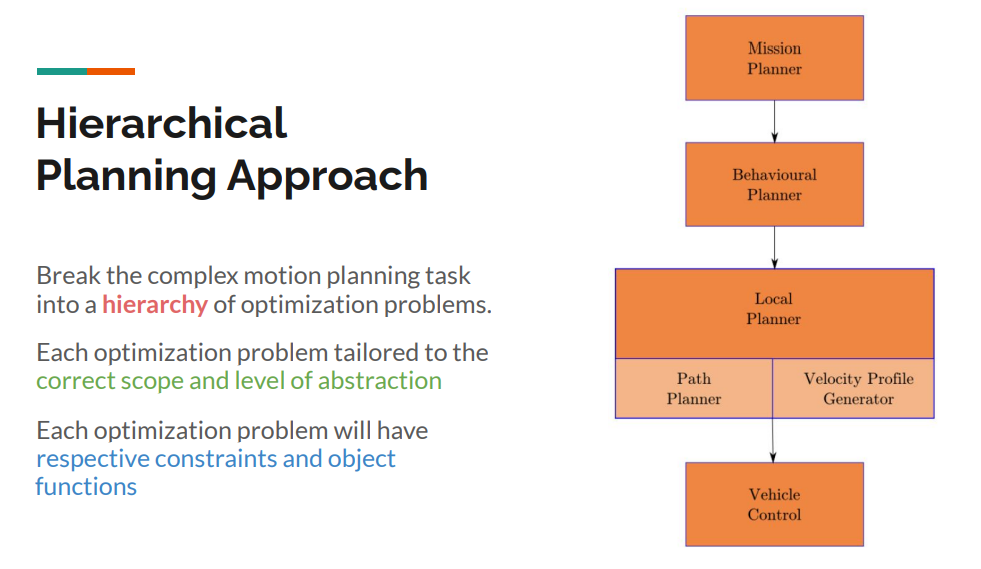
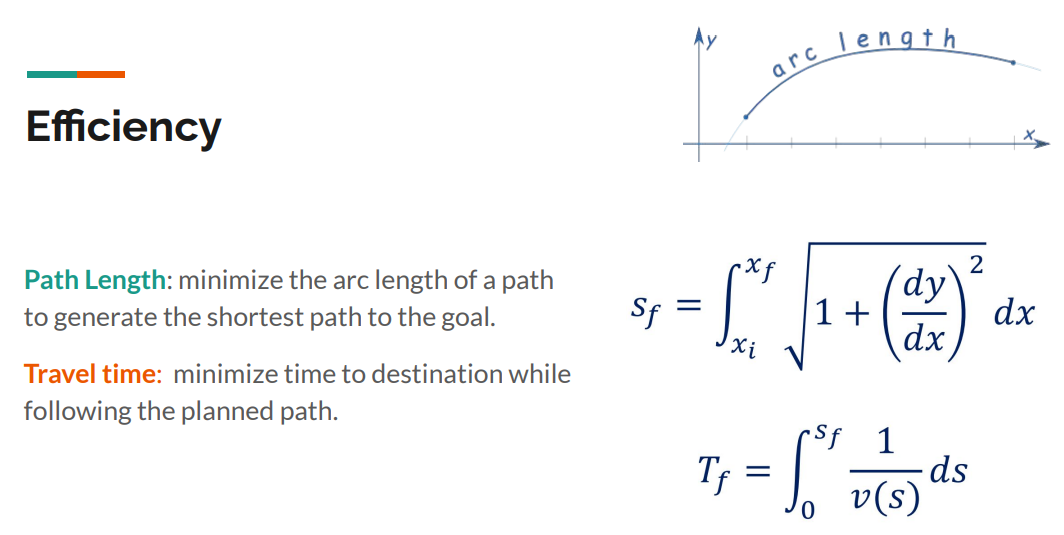
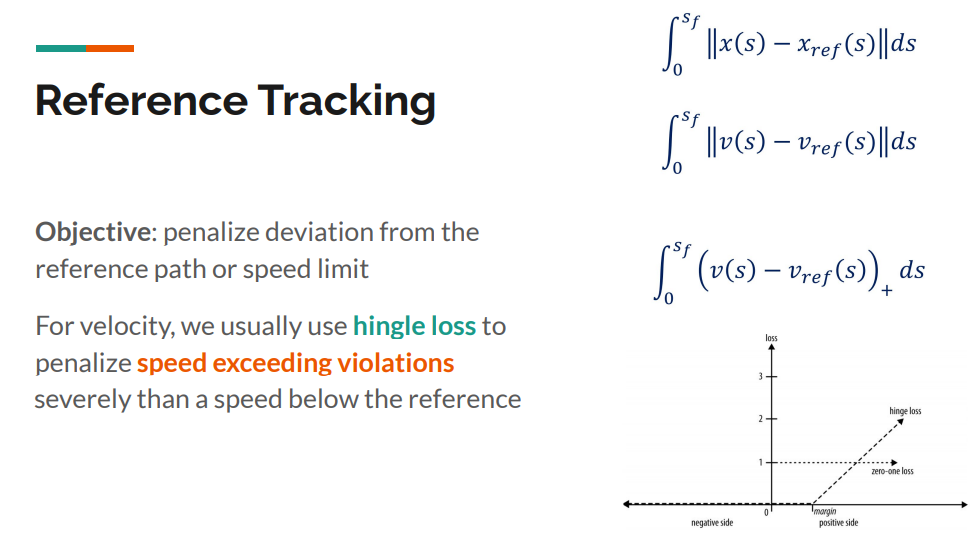
Objective functions in planning
Supplementary Readings
- Motion Planning For Autonomous Vehicles Based On Sequential Optimization.
- The kinematic bicycle model: A consistent model for planning feasible trajectories for autonomous vehicles, 2017 IEEE Intelligent Vehicles Symposium (IV), 2017. Gives an overview of the kinematic
bicycle model. - Steven M Lavalle, Planning Algorithms, 2006, Cambridge University Press. Chapter 2 covers discrete planning over graphs including Dijkstra’s, A* and STRIPS etc.
Origin: Dr. Chris Lu (Homepage)
Translate + Edit: YangSier (Homepage)
:four_leaf_clover:碎碎念:four_leaf_clover:
Hello米娜桑,这里是英国留学中的杨丝儿。我的博客的关键词集中在编程、算法、机器人、人工智能、数学等等,点个关注吧,持续高质量输出中。
:cherry_blossom:唠嗑QQ群:兔叽的魔术工房 (942848525)
:star:B站账号:白拾Official(活跃于知识区和动画区)


