Prerequisite knowledge
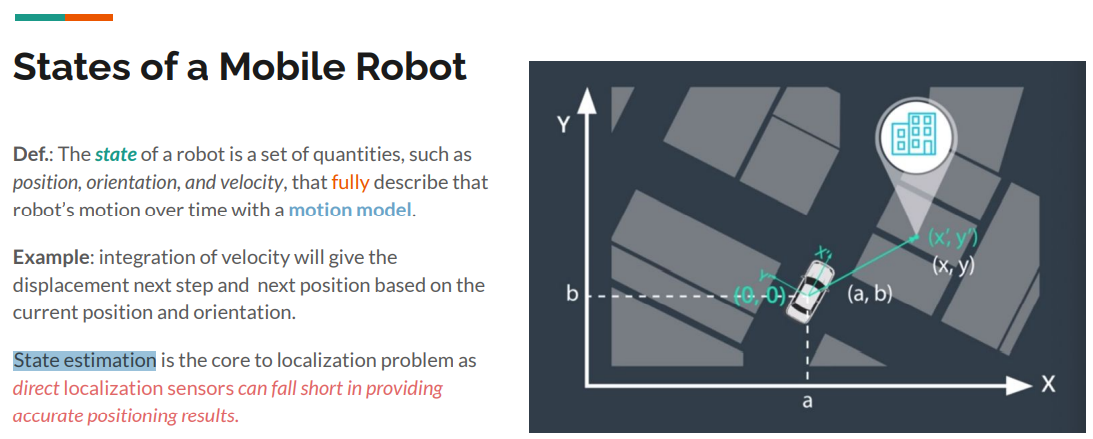
states of mobile robot, motion model, position orientation and velocity,
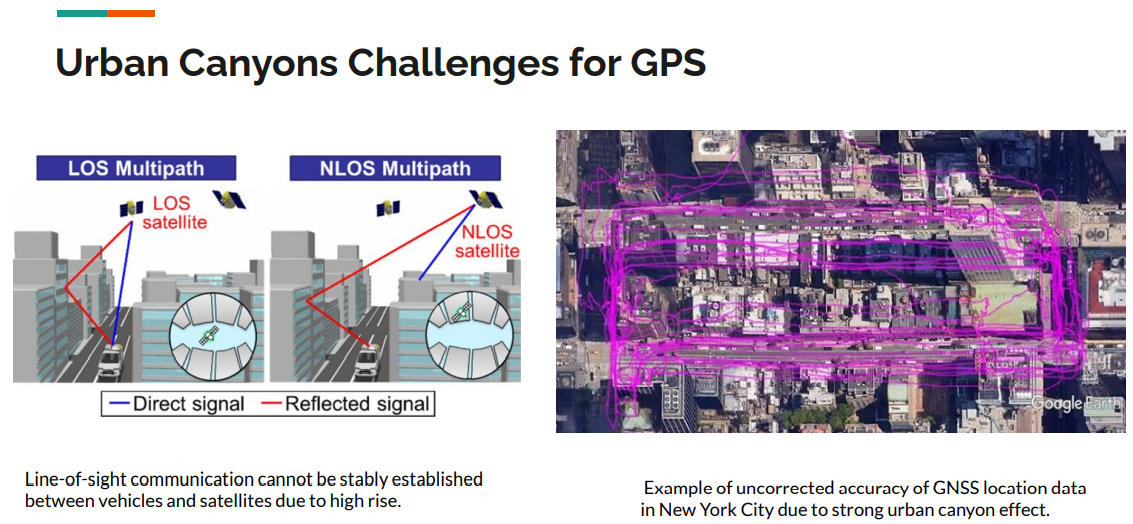
More challenge see: GPS
Kalman Filter
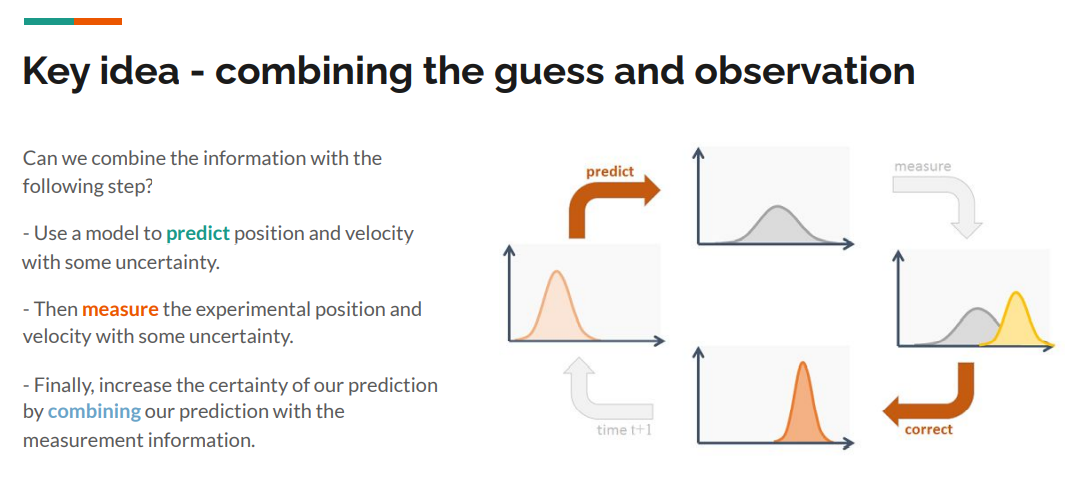
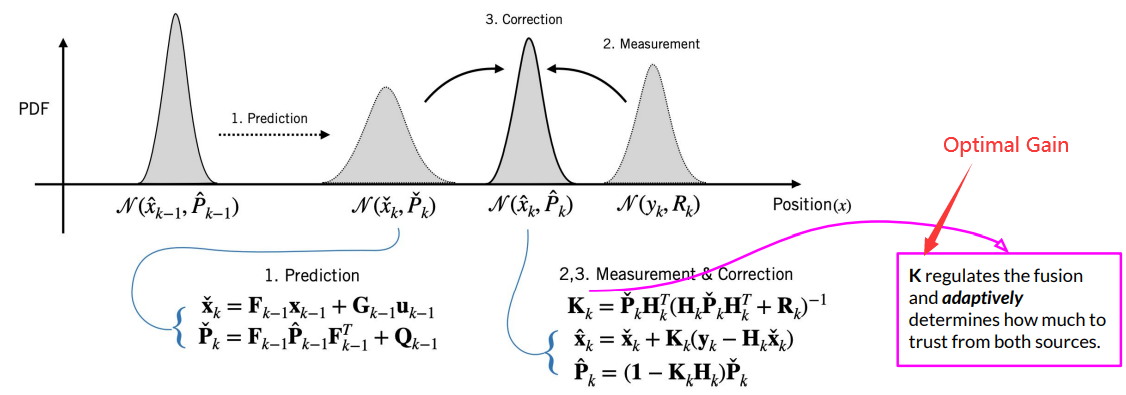
Predict, measure, combining
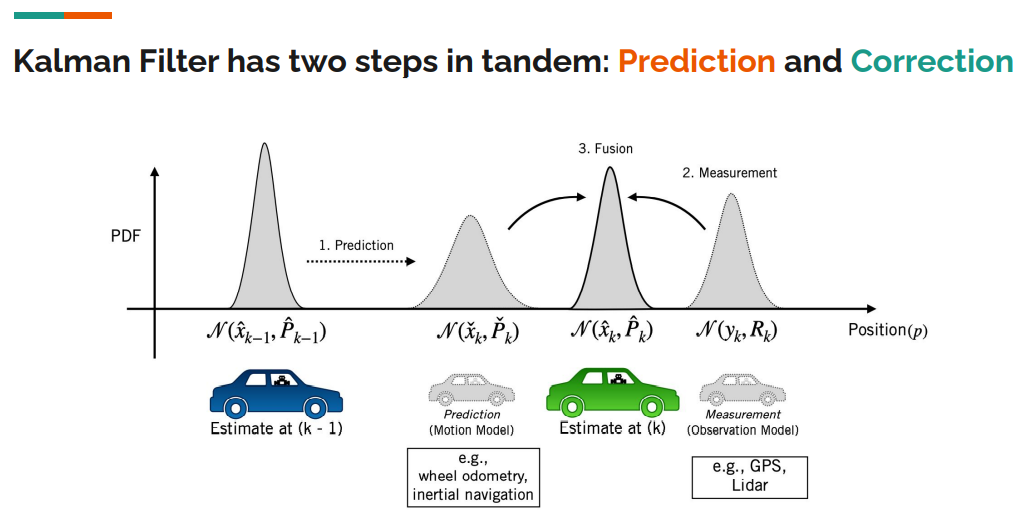
Prediction and correction
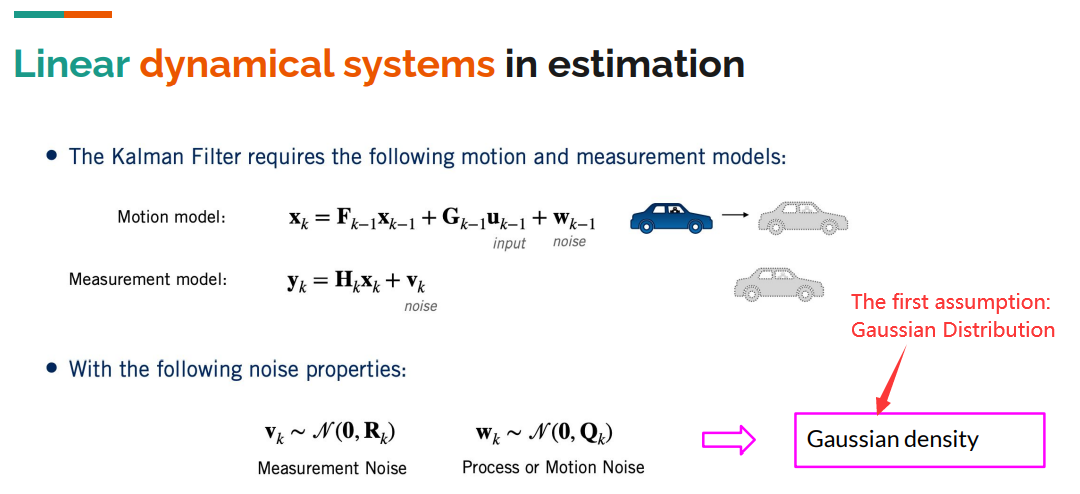
Linear Kalman Filter
Recursive Least Squares + Process Model
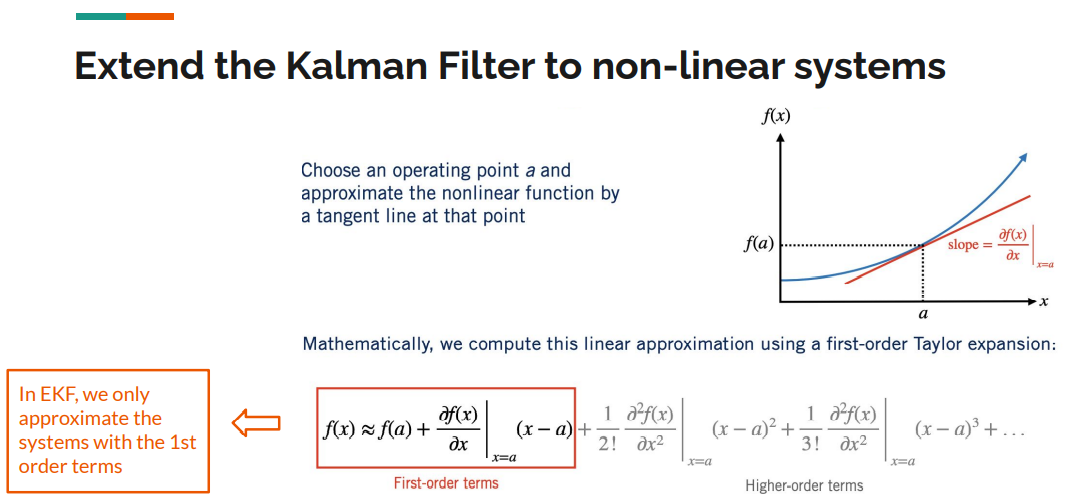
Extended Kalman Filter
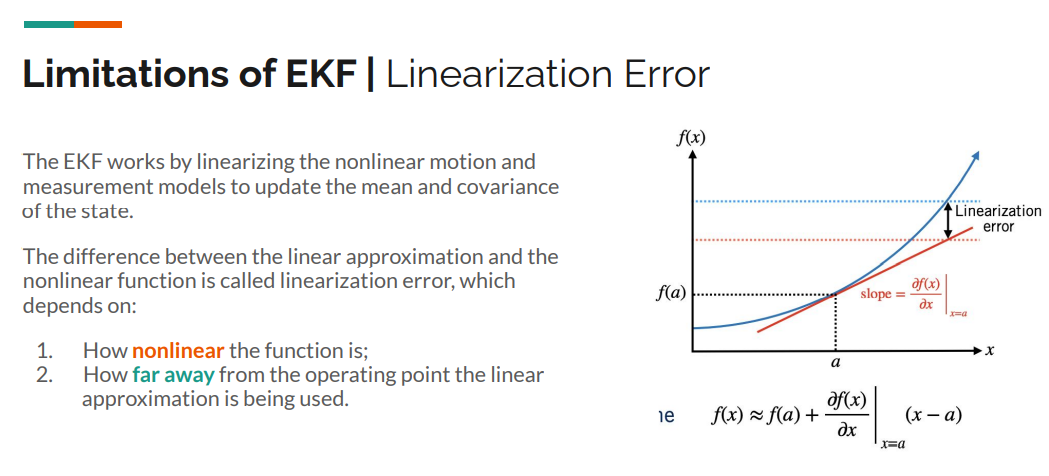
Linear approximation, first-order term, still linear.
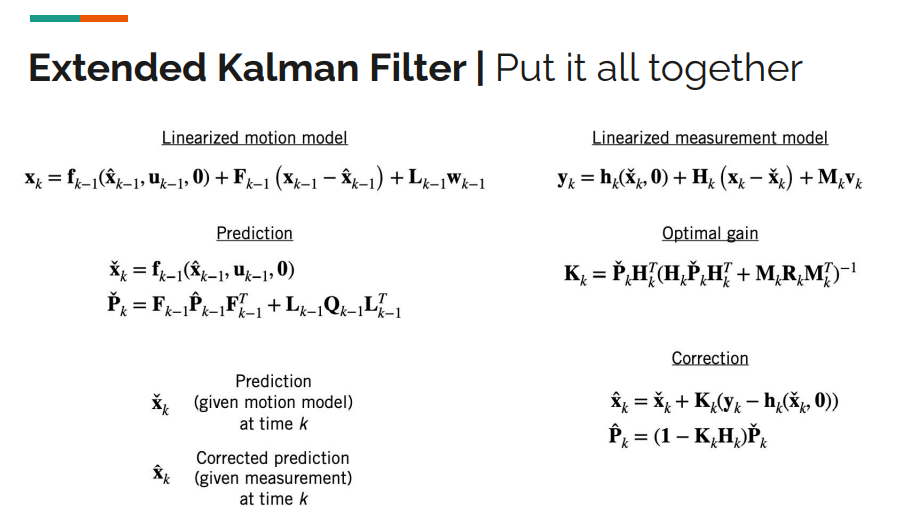
Linearized motion model, Linearized measurement model.
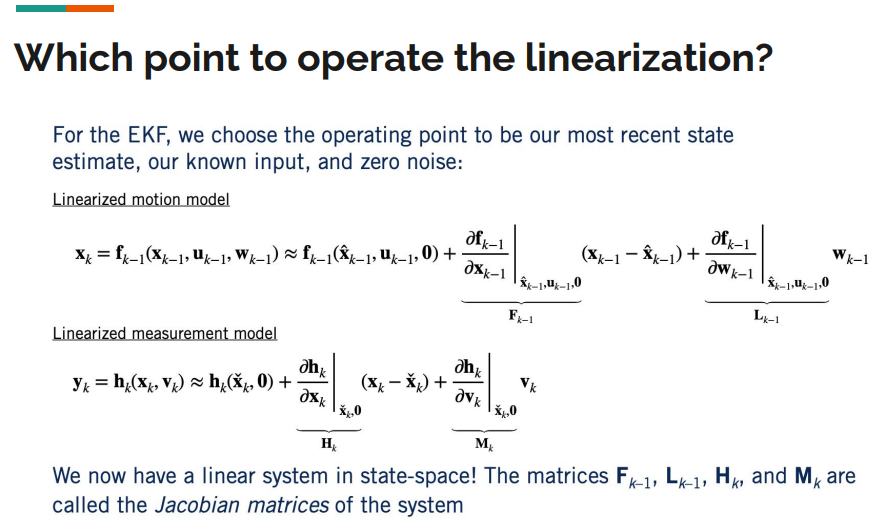
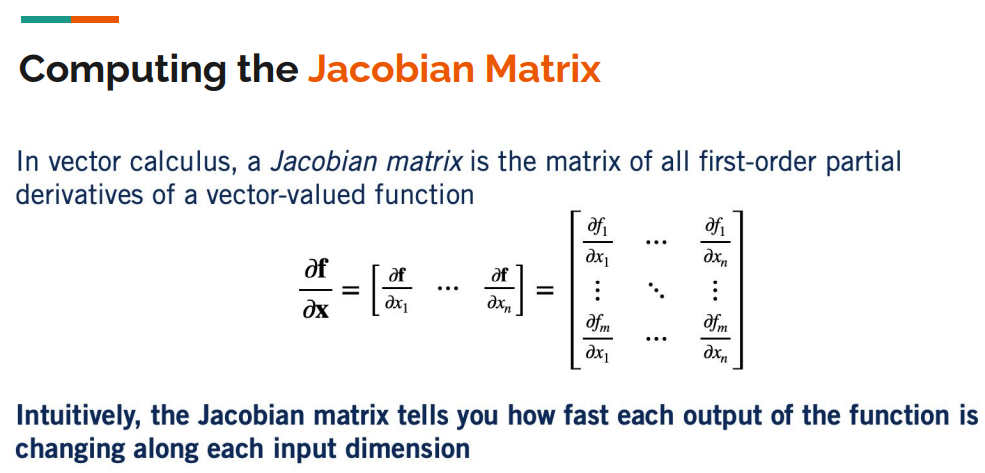
Jacobian matrix
Limitation of Kalman Filter
Summary
- The Kalman Filter is very similar to RLS but includes a motion model that tells us how the state evolves over time.
- The Kalman Filter updates a state estimate through two stages: i. prediction and ii. correction.
- The EKF uses linearization to adapt the Kalman filter to nonlinear systems.
- Linearization relies on computing Jacobian matrices, which contain all the first-order partial derivatives of a function.
- The EKF uses analytical local linearization and, as a result, is sensitive to linearization errors.
Supplementary Readings
- How a Kalman filter works, in pictures
- Extended Kalman Filter: Why do we need an Extended Version?
- PR, Section 3.1, 3.2, 3.3. (Optional)
- A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking (Optional)
- What is the difference between a particle filter and a Kalman filter?
Use approximate nonlinear Bayesian filters include EKF, approximate grid-based methods and particle filters for non linear cases.
Use approximate grid-based filters and particle filters for non-Gaussian cases.

Origin: Dr. Chris Lu (Homepage)
Translate + Edit: YangSier (Homepage)
:four_leaf_clover:碎碎念:four_leaf_clover:
Hello米娜桑,这里是英国留学中的杨丝儿。我的博客的关键词集中在编程、算法、机器人、人工智能、数学等等,点个关注吧,持续高质量输出中。
:cherry_blossom:唠嗑QQ群:兔叽的魔术工房 (942848525)
:star:B站账号:白拾Official(活跃于知识区和动画区)


