1. Kinematic Tree, Kinematic Chain, and Forward Geometry and Backward Geometry in Robotics
1.1. Demo Case Study: Robotic Arm for Assembly Line Tasks
- Super Domain: Kinematics in Robotics
- Type of Method: Kinematic Analysis and Control
1.2. Kinematic Tree and Kinematic Chain
- Objective: To model the structure and movement of a robotic arm.
- Kinematic Tree:
- Represents the hierarchical structure of a robot.
- Includes all possible movements and connections between different components.
- Kinematic Chain:
- A sequence of links and joints from the base to the end effector.
- Typically, a subset of the full kinematic tree, focusing on a specific task.
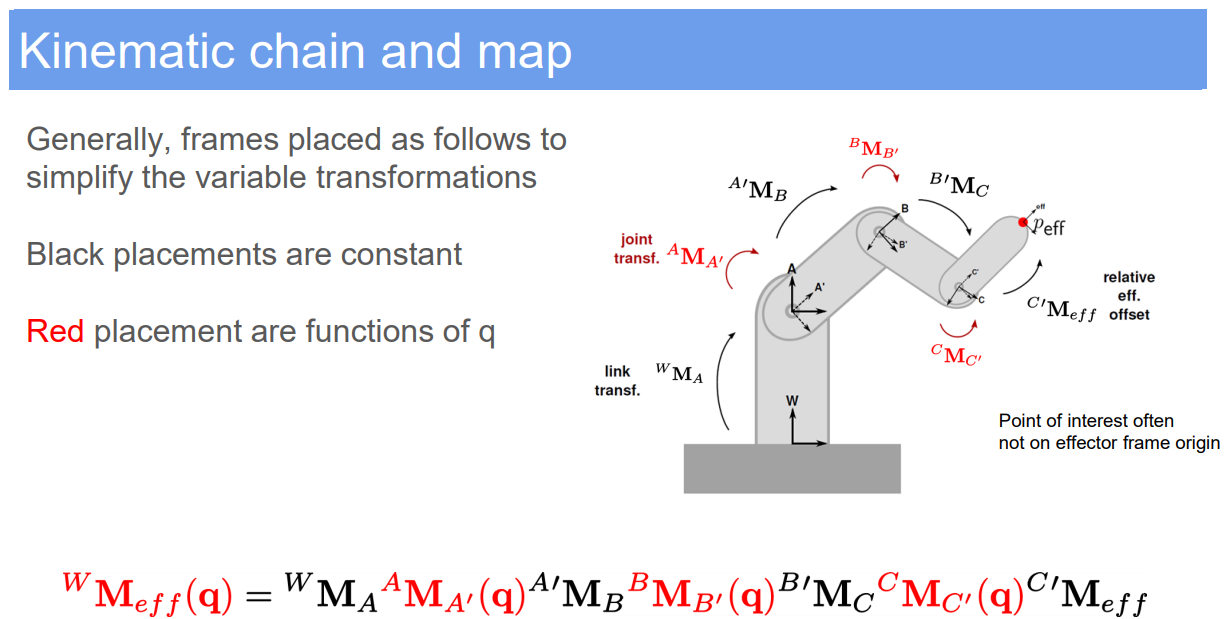
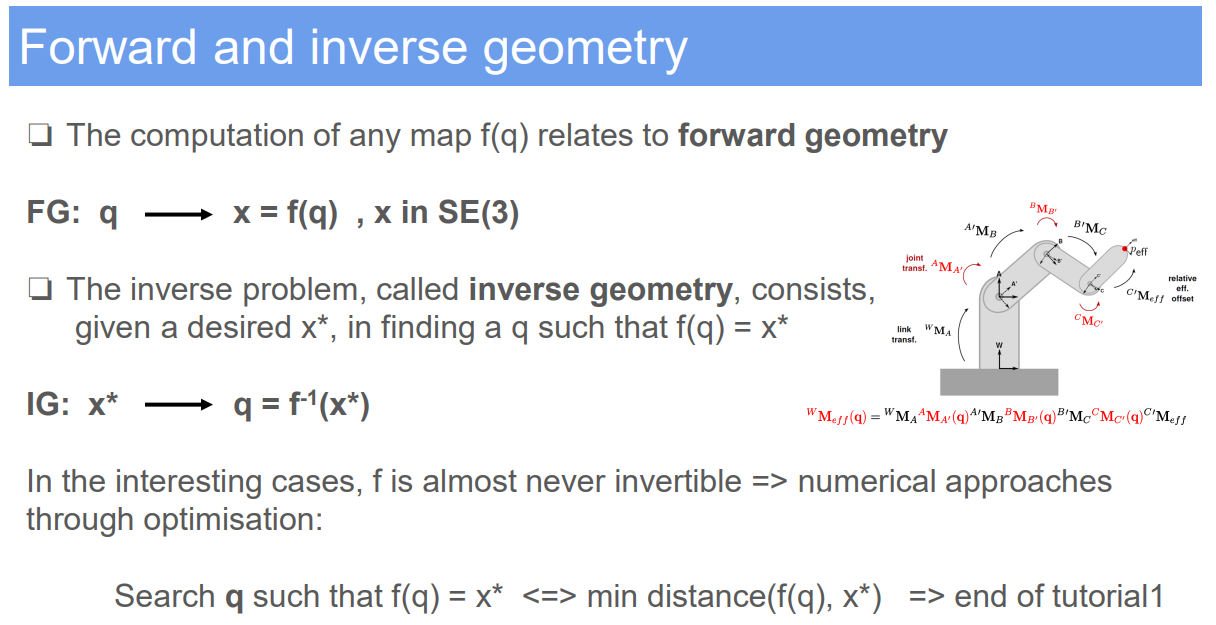
1.3. Forward Geometry
- Objective: To determine the position and orientation of the robot’s end effector, given its joint parameters.
- Variables:
- $\mathbf{q}$: Vector of joint parameters (angles for revolute joints, displacements for prismatic joints).
- $\mathbf{T}$: Homogeneous transformation matrix representing end effector position and orientation.
- Method:
- Utilize the kinematic chain to calculate $\mathbf{T}$ as a function of $\mathbf{q}$.
1.4. Inverse Geometry
- Objective: To compute the joint parameters that achieve a desired position and orientation of the end effector.
- Method:
- More complex than forward kinematics, often requiring numerical methods (find inverse of forward kinematics) or iterative algorithms (check inverse kinematics).
1.5. Jacobian Matrix
- Objective: To relate the velocities in the joint space to velocities in the Cartesian space.
- Variables:
- $\mathbf{J}$: Jacobian matrix.
- Method:
- Construct $\mathbf{J}$ such that $\dot{\mathbf{x}} = \mathbf{J} \dot{\mathbf{q}}$, where $\dot{\mathbf{x}}$ is the velocity in Cartesian space and $\dot{\mathbf{q}}$ is the velocity in joint space.
1.6. Strengths and Limitations
- Strengths:
- Provides a systematic approach to model and control robotic mechanisms.
- Facilitates the understanding of complex robotic systems and their motion capabilities.
- Essential for the design and control of robotic systems in various applications.
- Limitations:
- Inverse kinematics can be computationally intensive and may not have a unique solution.
- Jacobian matrices can become singular, leading to control difficulties.
1.7. Common Problems in Application
- Singularities in the kinematic chain, leading to loss of control or undefined behavior.
- Accuracy issues in forward and inverse kinematics due to mechanical tolerances and sensor errors.
- Computational complexity, especially for robots with a high degree of freedom.
1.8. Improvement Recommendations
- Implement redundancy management strategies to handle singularities.
- Use advanced algorithms like pseudo-inverse or optimization-based methods for inverse kinematics.
- Integrate real-time feedback and adaptive control mechanisms to compensate for inaccuracies.
2. Spatial Velocity Vector in Robotics
2.1. Demo Case Study: Calculating the Movement of a Robotic Arm’s End Effector
- Super Domain: Kinematics and Dynamics
- Type of Method: Vector Analysis
2.2. Problem Definition and Variables
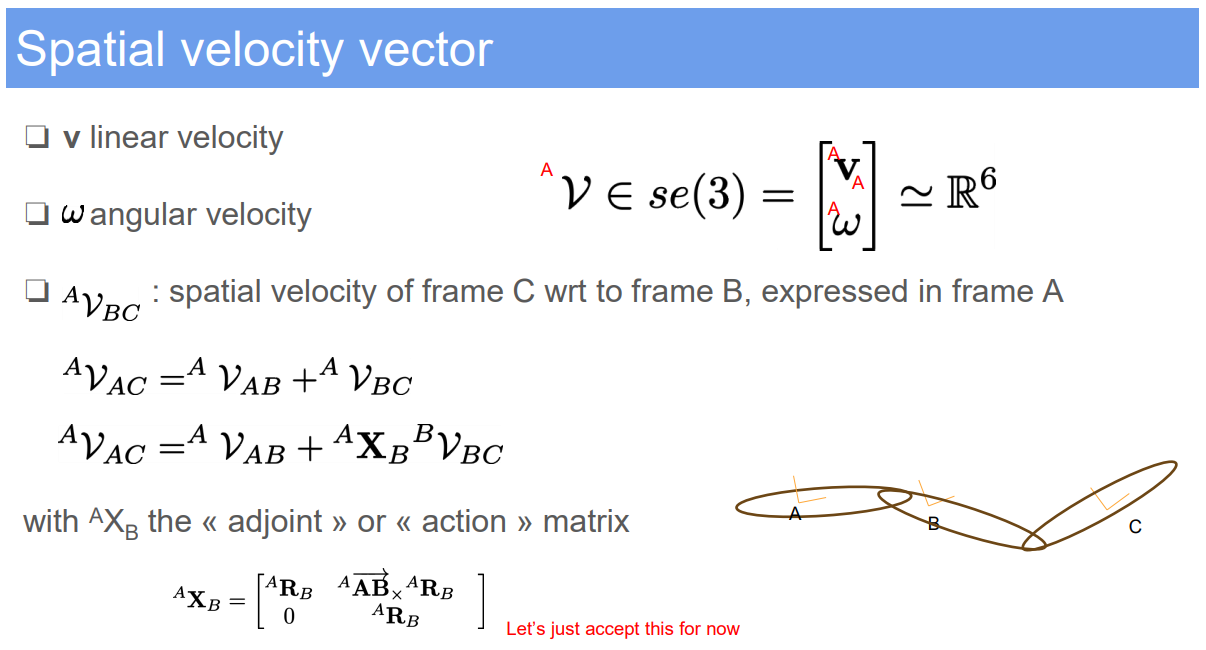
- Objective: To represent and compute the motion of a robotic arm’s end effector through its spatial velocity, which includes both linear and angular components.
- Variables:
- $\mathbf{v}$: Linear velocity component of the spatial velocity vector.
- $\mathbf{\omega}$: Angular velocity component of the spatial velocity vector.
- ${}^A\mathbf{v}_{BC}$: Spatial velocity of frame C with respect to frame B, expressed in frame A.
2.3. Assumptions
- The frames of reference are rigid, with no deformation under motion.
- The motion can be captured within the Euclidean space $se(3)$ framework.
2.4. Method Specification and Workflow
- Spatial Velocity Representation: Use the $se(3)$ group to describe the spatial velocity as a six-dimensional vector combining linear and angular velocity.
- Representation: $\mathbf{v} \in se(3) = \begin{bmatrix} \mathbf{v}^A \ \mathbf{\omega}^A \end{bmatrix}$.
- Velocity Composition: Determine the overall spatial velocity of the end effector (frame C) with respect to the base (frame A) by summing up individual velocities along the kinematic chain.
- Composition formulas:
$$
{}^A\mathbf{v}{AC} = {}^A\mathbf{v}{AB} + {}^A\mathbf{v}{BC}\
{}^A\mathbf{v}{AC} = {}^A\mathbf{v}{AB} + {}^A X_B ; {}^B\mathbf{v}{BC}
$$
- Composition formulas:
- Transformation Matrix Utilization: Apply the appropriate transformation matrices to express all velocities in a common frame of reference, typically the base frame.
2.5. Strengths and Limitations
- Strengths:
- Provides a complete description of motion, essential for control and analysis.
- Can be used to compute velocities for any point along a robotic arm or system.
- Limitations:
- Requires precise knowledge of the kinematic chain and transformations.
- The computation can become complex, especially for systems with multiple moving parts.
2.6. Common Problems in Application
- Errors in calculating transformation matrices can lead to incorrect velocity composition.
- The intricacy of multi-body systems can introduce challenges in real-time applications.
2.7. Improvement Recommendations
- Implement software frameworks that can automatically handle spatial transformations and velocity computations.
- Use state estimation techniques to accurately measure and update velocities, reducing errors from model inaccuracies.
- Integrate sensor feedback for real-time correction of spatial velocities.
3. Forward Kinematics for a Chain of Joints
3.1. Demo Case Study: Movement Analysis of a Robotic Arm
- Super Domain: Kinematics in Robotics
- Type of Method: Analytical Modeling
3.2. Problem Definition and Variables
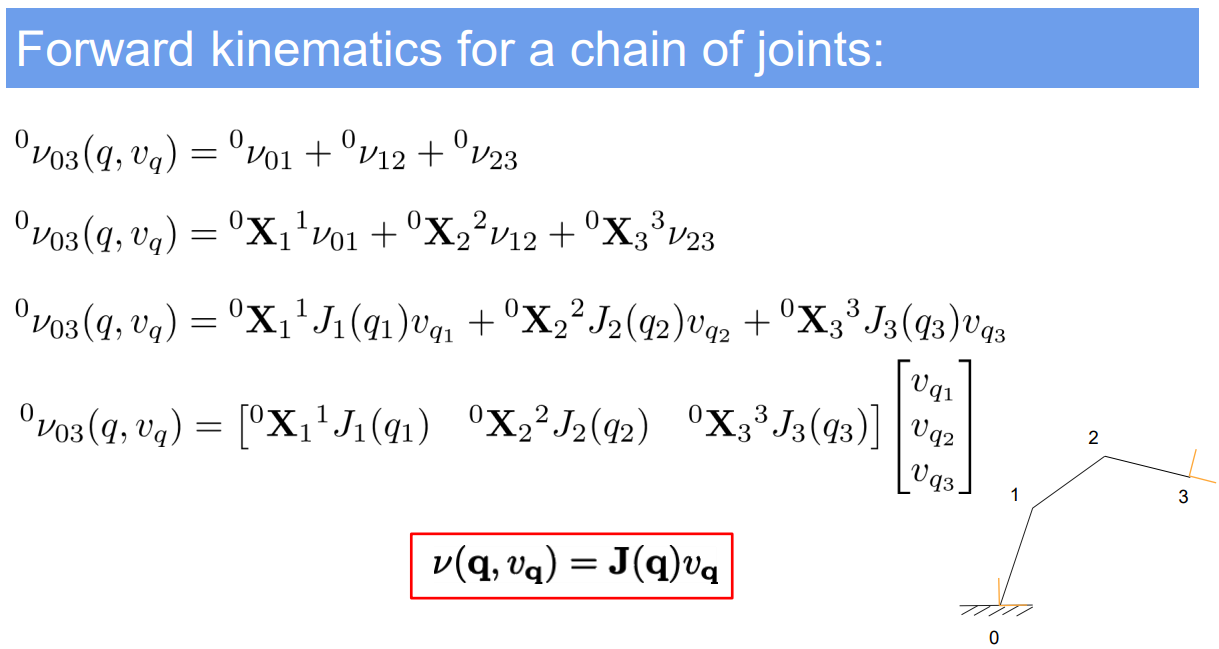
- Objective: To determine the position and orientation of a robotic arm’s end effector based on joint configurations.
- Variables:
- $q$: Vector of joint parameters (e.g., angles for revolute joints, displacements for prismatic joints).
- $J(q)$: Jacobian matrix at configuration $q$.
- $v(q, \dot{q})$: Velocity of the end effector in Cartesian space.
- $\dot{q}$: Vector of joint velocities.
3.3. Assumptions
- The robotic arm is composed of a series of rigid bodies connected by joints, forming a kinematic chain.
- The kinematic model of the robot is known and can be described by a set of parameters $q$.
3.4. Method Specification and Workflow
- Jacobian Computation: Calculate the Jacobian matrix $J(q)$, which relates joint velocities to end effector velocities in Cartesian space.
- Velocity Mapping: Use the Jacobian to map joint velocities $\dot{q}$ to the velocity of the end effector $v$ in Cartesian space using the formula:
- $v(q, \dot{q}) = J(q)\dot{q}$.
- Local Validity: Understand that the Jacobian is only valid locally, meaning it accurately describes the relationship between joint velocities and end effector velocities only in the vicinity of the configuration $q$.
3.5. Strengths and Limitations
- Strengths:
- Provides a direct and efficient way to calculate the end effector’s position and orientation.
- Essential for real-time control and path planning of robotic manipulators.
- Limitations:
- The Jacobian does not provide global information about the robot’s workspace.
- Singularities in the Jacobian matrix can lead to issues in control algorithms.
3.6. Common Problems in Application
- Computational complexity for robots with a high degree of freedom.
- Inaccuracies in the Jacobian matrix due to modeling errors or physical changes in the robot’s structure.
3.7. Improvement Recommendations
- Implement real-time Jacobian updates to accommodate changes in the robot’s configuration and avoid singularities.
- Utilize redundancy in robotic design to handle singularities and increase the robustness of the kinematic model.
- Integrate advanced sensors and feedback systems to refine the accuracy of the Jacobian matrix continually.
4. Inverse Kinematics (IK) and Inverse Geometry (IG) in Robotics
4.1. Demo Case Study: Configuring a Robotic Arm to Reach a Target Position
- Super Domain: Kinematics and Numerical Optimization
- Type of Method: Mathematical Problem-Solving
4.2. Problem Definition and Variables
- Objective: To determine the joint parameters that will position a robotic arm’s end effector at a desired location and orientation.
- Variables:
- IK: Inverse Kinematics, focusing on finding joint velocities $\dot{q}$ to achieve a desired end-effector velocity $\nu^*$.
- IG: Inverse Geometry, solving for joint positions $q$ that reach a specific end-effector pose.
- $J(q)$: Jacobian matrix at joint configuration $q$, relating joint velocities to end-effector velocities.
4.3. Assumptions
- The kinematic structure of the robotic arm is well-defined and the Jacobian matrix can be computed.
4.4. Method Specification and Workflow
- IK Formulation:
- Solve $\min_{\dot{q}} | \nu(q, \dot{q}) - \nu^* |^2$, where $\nu(q, \dot{q}) = J(q)\dot{q}$.
- Utilize the Moore-Penrose pseudo-inverse $J^+$ when the Jacobian is not invertible.
- IG Formulation:
- Solve $\min_q \text{dist}(^{0}M_e(q), ^{0}M_)$ for pose and $\min_{\dot{q}} \text{dist}(^{0}M_e(q_0 \oplus \dot{q}), ^{0}M_)$ for velocity, with $^{0}M_e$ denoting the end-effector pose in the base frame and $^{0}M_*$ being the target pose.
- IK with Constraints:
- Consider velocity bounds $\dot{q}^- \leq \dot{q} \leq \dot{q}^+$ and joint limits $q^- \leq q + \Delta t \dot{q} \leq q^+$ to the optimization problem.
- Solve using a Quadratic Program (QP) solver like ‘quadprog’.
4.5. Strengths and Limitations
- Strengths:
- IK is a linear problem and generally easier to solve, providing a precise control mechanism for robotic motion.
- IG offers a more direct approach to reaching a specific target pose.
- Limitations:
- The Jacobian matrix may not always be invertible, necessitating pseudo-inverse solutions.
- IG is a nonlinear problem and can be computationally challenging, often requiring iterative methods.
4.6. Common Problems in Application
- Jacobian singularities can lead to control problems and undefined velocities.
- High computational cost for iterative solutions in IG.
- Difficulty in ensuring convergence to the global minimum for IG problems.
4.7. Improvement Recommendations
- Apply redundancy in the robotic design to mitigate the effects of singularities.
- Use optimization libraries that are robust to numerical issues and can handle constraints effectively.
- For IG, consider gradient descent methods and initialization strategies to improve convergence.
Reference: The University of Edinburgh, Advanced Robotics, course link
Author: YangSier (discover304.top)
🍀碎碎念🍀
Hello米娜桑,这里是英国留学中的杨丝儿。我的博客的关键词集中在编程、算法、机器人、人工智能、数学等等,持续高质量输出中。
🌸唠嗑QQ群:兔叽の魔术工房 (942848525)
⭐B站账号:白拾Official(活跃于知识区和动画区)
Cover image credit to AI generator.



